ઊર્જા બચાવવાના સાધન તરીકે વેરિયેબલ ઇલેક્ટ્રિક ડ્રાઇવ
 અનિયંત્રિત ઇલેક્ટ્રિક ડ્રાઇવથી નિયમનકારીમાં સંક્રમણ એ ઇલેક્ટ્રિક ડ્રાઇવ અને તકનીકી ક્ષેત્રમાં ઇલેક્ટ્રિક ડ્રાઇવના માધ્યમથી ઊર્જા બચાવવા માટેની મુખ્ય રીતોમાંની એક છે.
અનિયંત્રિત ઇલેક્ટ્રિક ડ્રાઇવથી નિયમનકારીમાં સંક્રમણ એ ઇલેક્ટ્રિક ડ્રાઇવ અને તકનીકી ક્ષેત્રમાં ઇલેક્ટ્રિક ડ્રાઇવના માધ્યમથી ઊર્જા બચાવવા માટેની મુખ્ય રીતોમાંની એક છે.
નિયમ પ્રમાણે, ઉત્પાદન મિકેનિઝમ્સની ઇલેક્ટ્રિક ડ્રાઇવ્સની ગતિ અથવા ટોર્કને નિયંત્રિત કરવાની જરૂરિયાત તકનીકી પ્રક્રિયાની આવશ્યકતાઓ દ્વારા નક્કી કરવામાં આવે છે. ઉદાહરણ તરીકે, કટરનો ફીડ રેટ લેથ પર વર્કપીસની પ્રક્રિયા કરવાની સ્વચ્છતા નક્કી કરે છે, કારને રોકતા પહેલા સચોટ સ્થિતિ માટે એલિવેટરની ગતિમાં ઘટાડો જરૂરી છે, વિન્ડિંગ શાફ્ટના ટોર્કને સમાયોજિત કરવાની જરૂરિયાત દ્વારા નિર્ધારિત કરવામાં આવે છે. ઘાયલ સામગ્રીના તાણની સતત શક્તિ જાળવવાની શરતો, વગેરે.
જો કે, ત્યાં સંખ્યાબંધ મિકેનિઝમ્સ છે જેને તકનીકી પરિસ્થિતિઓ અનુસાર ગતિમાં ફેરફારની જરૂર નથી, અથવા તકનીકી પ્રક્રિયાના પરિમાણોને પ્રભાવિત કરવાની અન્ય (બિન-વિદ્યુત) પદ્ધતિઓ નિયમન માટે ઉપયોગમાં લેવાય છે.
સૌ પ્રથમ, તેમાં ઘન, પ્રવાહી અને વાયુયુક્ત ઉત્પાદનોને ખસેડવા માટે સતત પરિવહન પદ્ધતિઓ શામેલ છે: કન્વેયર્સ, ચાહકો, ચાહકો, પંપ એકમો. આ મિકેનિઝમ્સ માટે, હાલમાં, એક નિયમ તરીકે, અનિયંત્રિત અસુમેળ ઇલેક્ટ્રિક ડ્રાઇવ્સનો ઉપયોગ કરવામાં આવે છે, જે મિકેનિઝમ્સ પરના ભારને ધ્યાનમાં લીધા વિના, કાર્યકારી સંસ્થાઓને સતત ગતિએ ગતિમાં સેટ કરે છે. તેના આંશિક લોડ હેઠળ, સતત ઝડપે ઓપરેટિંગ મોડ્સ વધારો દ્વારા વર્ગીકૃત થયેલ છે ચોક્કસ ઊર્જા વપરાશ નોમિનલ મોડની સરખામણીમાં.
NSC પ્રદર્શનમાં ઘટાડો, કન્વેયરની કાર્યક્ષમતા ઘટે છે, કારણ કે વપરાશ કરેલ શક્તિનો સંબંધિત હિસ્સો નિષ્ક્રિય ક્ષણને દૂર કરે છે. વધુ આર્થિક એ વેરિયેબલ સ્પીડ મોડ છે, જે સમાન કામગીરી પ્રદાન કરે છે, પરંતુ ખેંચવાના પ્રયત્નોના સતત ઘટક સાથે.
અંજીરમાં. 1 નિષ્ક્રિય ક્ષણ Mx = 0 સાથે કન્વેયર માટે મોટર શાફ્ટની પાવર અવલંબન દર્શાવે છે, સતત (v — const) માટે ЗМв અને લોડની હિલચાલની એડજસ્ટેબલ (Fg = const) ઝડપ. આકૃતિમાં છાંયડો વિસ્તાર ઝડપ નિયંત્રણ દ્વારા મેળવેલી ઊર્જા બચત દર્શાવે છે.
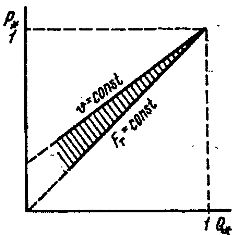
ચોખા. 1. કન્વેયરની કામગીરી પર ઇલેક્ટ્રિક મોટર શાફ્ટની શક્તિની નિર્ભરતા
તેથી જો કન્વેયરની ઝડપ નજીવી કિંમતના 60% સુધી ઘટાડવામાં આવે છે, તો મોટર્સની શાફ્ટની શક્તિ નજીવી કિંમતની તુલનામાં 10% ઘટશે. સ્પીડ રેગ્યુલેશનની અસર વધારે છે, નિષ્ક્રિય ટોર્ક વધારે છે અને તે કન્વેયરની કામગીરીને વધુ નોંધપાત્ર રીતે ઘટાડે છે.
અંડરલોડિંગ સાથે સતત પરિવહન મિકેનિઝમ્સની ઝડપ ઘટાડવાથી તમે ઓછા ચોક્કસ ઉર્જા વપરાશ સાથે જરૂરી માત્રામાં કાર્ય કરી શકો છો, એટલે કે મૂવિંગ પ્રોડક્ટ્સની તકનીકી પ્રક્રિયામાં ઊર્જા વપરાશ ઘટાડવાની સંપૂર્ણ આર્થિક સમસ્યાને હલ કરવા માટે.
સામાન્ય રીતે, આવી મિકેનિઝમ્સની ગતિમાં ઘટાડો સાથે, તકનીકી ઉપકરણોની ઓપરેશનલ લાક્ષણિકતાઓમાં સુધારણાને કારણે આર્થિક અસર પણ દેખાય છે. તેથી, જ્યારે ઝડપ ઘટે છે, ત્યારે કન્વેયર બોડીનું વસ્ત્રો ઘટે છે, પ્રવાહી અને વાયુઓ સપ્લાય કરવા માટે મશીનો દ્વારા વિકસિત દબાણમાં ઘટાડો થવાને કારણે પાઇપલાઇન્સ અને ફિટિંગની સર્વિસ લાઇફ વધે છે, અને આ ઉત્પાદનોનો વધુ પડતો વપરાશ પણ દૂર થાય છે.
ટેક્નોલોજીના ક્ષેત્રમાં અસર ઘણીવાર ઉર્જા બચત કરતાં નોંધપાત્ર રીતે વધારે હોય છે, તેથી જ માત્ર ઉર્જા પાસાનું મૂલ્યાંકન કરીને આવા મિકેનિઝમ્સ માટે નિયંત્રિત ઇલેક્ટ્રિક ડ્રાઇવનો ઉપયોગ કરવાની સલાહ પર નિર્ણય લેવાનું મૂળભૂત રીતે ખોટું છે.
પાવડો મશીનો ઝડપ નિયંત્રણ.
પ્રવાહી અને વાયુઓના પુરવઠા માટે કેન્દ્રત્યાગી મિકેનિઝમ્સ (પંખા, પંપ, પંખા, કોમ્પ્રેસર) એ મુખ્ય સામાન્ય ઔદ્યોગિક મિકેનિઝમ્સ છે જેમાં ચોક્કસ ઉર્જા વપરાશને નોંધપાત્ર રીતે ઘટાડવાની સમગ્ર દેશમાં સૌથી મોટી સંભાવના છે. સેન્ટ્રીફ્યુગલ મિકેનિઝમ્સની વિશેષ સ્થિતિ તેમની વિશાળતા, ઉચ્ચ શક્તિ દ્વારા, એક નિયમ તરીકે, લાંબા ઓપરેટિંગ મોડ સાથે સમજાવવામાં આવે છે.
આ સંજોગો દેશના ઉર્જા સંતુલનમાં આ પદ્ધતિઓનો નોંધપાત્ર હિસ્સો નક્કી કરે છે.પંપ, પંખા અને કોમ્પ્રેસર માટે ડ્રાઈવ મોટર્સની કુલ સ્થાપિત ક્ષમતા તમામ પાવર પ્લાન્ટની ક્ષમતાના લગભગ 20% જેટલી છે, જ્યારે એકલા પંખા દેશમાં ઉત્પાદિત તમામ વીજળીના લગભગ 10% વપરાશ કરે છે.
સેન્ટ્રીફ્યુગલ મિકેનિઝમ્સના ઓપરેટિંગ પ્રોપર્ટીઝને ફ્લો રેટ Q પર હેડ H અને ફ્લો રેટ Q પર પાવર P પર નિર્ભરતાના સ્વરૂપમાં રજૂ કરવામાં આવે છે. ઓપરેશનના સ્થિર મોડમાં, કેન્દ્રત્યાગી મિકેનિઝમ દ્વારા બનાવેલ હેડ સંતુલિત થાય છે. હાઇડ્રો- અથવા એરોડાયનેમિક નેટવર્કનું દબાણ જેમાં તે પ્રવાહી અથવા ગેસ પહોંચાડે છે.
દબાણનો સ્થિર ઘટક પંપ માટે નિર્ધારિત કરવામાં આવે છે — વપરાશકર્તા અને પંપના સ્તરો વચ્ચેના ભૌગોલિક તફાવત દ્વારા; ચાહકો માટે - કુદરતી આકર્ષણ; ચાહકો અને કોમ્પ્રેસર માટે — નેટવર્ક (જળાશય) માં કોમ્પ્રેસ્ડ ગેસ પ્રેશરમાંથી.
પંપ અને નેટવર્કની Q-H- લાક્ષણિકતાઓના આંતરછેદનો બિંદુ H-Hn અને Q — Qn પરિમાણો નક્કી કરે છે. સતત ગતિએ કાર્યરત પંપના પ્રવાહ દર Qનું નિયમન સામાન્ય રીતે આઉટલેટ પરના વાલ્વ દ્વારા કરવામાં આવે છે અને નેટવર્કની લાક્ષણિકતામાં ફેરફાર તરફ દોરી જાય છે, પરિણામે પ્રવાહ દર QA * <1 ને અનુરૂપ છે. પંપની લાક્ષણિકતા સાથે આંતરછેદનું બિંદુ.
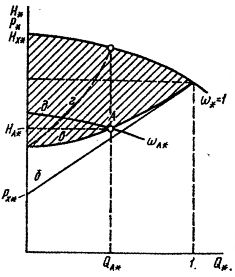
ચોખા. 2. ક્યૂ-એચ-પમ્પિંગ યુનિટની લાક્ષણિકતાઓ
વિદ્યુત સર્કિટ સાથે સામ્યતા દ્વારા, વાલ્વ દ્વારા પ્રવાહને નિયંત્રિત કરવું એ સર્કિટના વિદ્યુત પ્રતિકારને વધારીને વર્તમાનને નિયંત્રિત કરવા સમાન છે. દેખીતી રીતે, આ નિયંત્રણ પદ્ધતિ ઉર્જા દૃષ્ટિકોણથી કાર્યક્ષમ નથી, કારણ કે તે નિયમનકારી તત્વો (રેઝિસ્ટર, વાલ્વ) માં બિનઉત્પાદક ઉર્જા નુકશાન સાથે છે. વાલ્વની ખોટ ફિગમાં છાયાવાળા વિસ્તાર દ્વારા દર્શાવવામાં આવી છે. 1.
વિદ્યુત સર્કિટની જેમ, ઉર્જા સ્ત્રોતને તેના વપરાશકર્તા કરતાં નિયમન કરવું વધુ આર્થિક છે. આ કિસ્સામાં, સ્ત્રોત વોલ્ટેજમાં ઘટાડો થવાને કારણે વિદ્યુત સર્કિટ્સમાં લોડ વર્તમાન ઘટે છે. હાઇડ્રોલિક અને એરોડાયનેમિક નેટવર્ક્સમાં, મિકેનિઝમ દ્વારા બનાવેલા દબાણને ઘટાડીને સમાન અસર પ્રાપ્ત થાય છે, જે તેના ઇમ્પેલરની ઝડપને ઘટાડીને અનુભવાય છે.
જ્યારે ઝડપ બદલાય છે, ત્યારે સમાનતાના નિયમો અનુસાર કેન્દ્રત્યાગી મિકેનિઝમ્સની ઓપરેટિંગ લાક્ષણિકતાઓ બદલાય છે, જેનું સ્વરૂપ છે: Q * = ω *, H * = ω *2, P * = ω *3
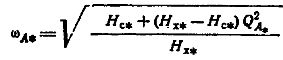
પંપ ઇમ્પેલરની ગતિ કે જેના પર તેની લાક્ષણિકતા બિંદુ Aમાંથી પસાર થશે:
સ્પીડ રેગ્યુલેશન દરમિયાન પંપ દ્વારા ઉપયોગમાં લેવાતી શક્તિ માટે અભિવ્યક્તિ છે:

ઝડપ પર ક્ષણની ચતુર્ભુજ અવલંબન મુખ્યત્વે ચાહકો માટે લાક્ષણિકતા છે, કારણ કે કુદરતી થ્રસ્ટ દ્વારા નિર્ધારિત માથાનો સ્થિર ઘટક Hx કરતા નોંધપાત્ર રીતે નાનો છે. તકનીકી સાહિત્યમાં, ગતિ પર ક્ષણની અંદાજિત અવલંબનનો ઉપયોગ કેટલીકવાર થાય છે, જે કેન્દ્રત્યાગી મિકેનિઝમની આ મિલકતને ધ્યાનમાં લે છે:
M* = ω *n
જ્યાં n = 2 પર Hc = 0 અને nHc> 0 પર. ગણતરીઓ અને પ્રયોગો દર્શાવે છે કે n=2 — 5, અને તેના મોટા મૂલ્યો નોંધપાત્ર પીઠના દબાણ સાથે નેટવર્કમાં કાર્યરત કોમ્પ્રેસરની લાક્ષણિકતા છે.
સતત અને ચલ ગતિએ પંપ ઓપરેટિંગ મોડ્સનું વિશ્લેષણ દર્શાવે છે કે ω= const પર વધારાનો ઉર્જા વપરાશ ખૂબ જ નોંધપાત્ર છે. ઉદાહરણ તરીકે, પરિમાણો સાથે પંપના ઓપરેટિંગ મોડ્સની ગણતરીના પરિણામો Hx * = 1.2 નીચે દર્શાવેલ છે; Px*= 0.3 વિવિધ બેક પ્રેશર સાથે નેટવર્ક પર Зс:
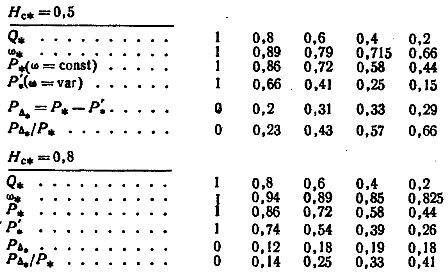
આપેલ ડેટા દર્શાવે છે કે નિયંત્રિત ઇલેક્ટ્રિક ડ્રાઇવ વપરાશ કરેલ વીજળીના વપરાશને નોંધપાત્ર રીતે ઘટાડી શકે છે: પ્રથમ કિસ્સામાં 66% સુધી અને બીજા કિસ્સામાં 41% સુધી. વ્યવહારમાં, આ અસર હજી વધારે હોઈ શકે છે, કારણ કે વિવિધ કારણોસર (વાલ્વની ગેરહાજરી અથવા ખામી, મેન્યુઅલ એક્ટ્યુએશન), વાલ્વ દ્વારા નિયમન બિલકુલ લાગુ પડતું નથી, જે માત્ર વીજળીના વપરાશમાં વધારો તરફ દોરી જાય છે, પણ હાઇડ્રોલિક નેટવર્કમાં વધુ પડતા પ્રયત્નો અને ખર્ચ માટે.
સતત પરિમાણો સાથે નેટવર્કમાં સિંગલ-એક્ટિંગ સેન્ટ્રીફ્યુગલ મિકેનિઝમ્સના ઊર્જા મુદ્દાઓ ઉપર ચર્ચા કરવામાં આવી છે. વ્યવહારમાં, કેન્દ્રત્યાગી મિકેનિઝમ્સની સમાંતર કામગીરી છે અને નેટવર્કમાં ઘણીવાર ચલ પરિમાણો હોય છે. ઉદાહરણ તરીકે, ખાણકામ નેટવર્કનો એરોડાયનેમિક પ્રતિકાર દિવાલોની લંબાઈમાં ફેરફાર સાથે બદલાય છે, પાણી પુરવઠા નેટવર્કનો હાઇડ્રોડાયનેમિક પ્રતિકાર પાણીના વપરાશના મોડ દ્વારા નક્કી કરવામાં આવે છે, જે દિવસ દરમિયાન બદલાય છે, વગેરે.
કેન્દ્રત્યાગી મિકેનિઝમ્સની સમાંતર કામગીરી સાથે, બે કિસ્સાઓ શક્ય છે:
1) તમામ મિકેનિઝમ્સની ગતિ એક સાથે અને સિંક્રનસ રીતે નિયંત્રિત થાય છે;
2) એક મિકેનિઝમ અથવા મિકેનિઝમ્સના ભાગની ગતિ નિયંત્રિત થાય છે.
જો નેટવર્ક પરિમાણો સતત હોય, તો પ્રથમ કિસ્સામાં તમામ મિકેનિઝમ્સને એક સમકક્ષ ગણી શકાય જેના માટે ઉપરોક્ત તમામ સંબંધો માન્ય છે. બીજા કિસ્સામાં, મિકેનિઝમ્સના અનિયંત્રિત ભાગનું દબાણ પાછળના દબાણની જેમ નિયંત્રિત ભાગ પર સમાન અસર કરે છે અને તે ખૂબ જ નોંધપાત્ર છે, તેથી જ અહીં વીજળીની બચત નજીવી શક્તિના 10-15% કરતા વધી નથી. મશીનની.
વેરિયેબલ નેટવર્ક પરિમાણો નેટવર્ક સાથે કેન્દ્રત્યાગી મિકેનિઝમ્સના સહકારના વિશ્લેષણને ખૂબ જટિલ બનાવે છે. આ કિસ્સામાં, નિયંત્રિત ઇલેક્ટ્રિક ડ્રાઇવની ઊર્જા કાર્યક્ષમતા એવા વિસ્તારના સ્વરૂપમાં નક્કી કરી શકાય છે જેની સીમાઓ નેટવર્ક પરિમાણોના મર્યાદા મૂલ્યો અને કેન્દ્રત્યાગી મિકેનિઝમની ગતિને અનુરૂપ છે.
આ વિષય પર પણ જુઓ: પંપ એકમો માટે VLT AQUA ડ્રાઇવ ફ્રીક્વન્સી કન્વર્ટર