ઓપરેશનનો સિદ્ધાંત અને ઇલેક્ટ્રિક મોટરનું ઉપકરણ
કોઈપણ ઇલેક્ટ્રિક મોટર તેના પર લાગુ વીજળીના વપરાશને કારણે યાંત્રિક કાર્ય કરવા માટે રચાયેલ છે, જે સામાન્ય રીતે રોટરી ગતિમાં રૂપાંતરિત થાય છે. તેમ છતાં તકનીકીમાં એવા મોડેલો છે જે તરત જ કાર્યકારી સંસ્થાની અનુવાદાત્મક ચળવળ બનાવે છે. આને રેખીય મોટર કહેવામાં આવે છે.
ઔદ્યોગિક સ્થાપનોમાં, ઇલેક્ટ્રિક મોટર્સ વિવિધ મેટલ-કટીંગ મશીનો અને તકનીકી ઉત્પાદન પ્રક્રિયામાં સામેલ યાંત્રિક ઉપકરણો ચલાવે છે.
ઘરગથ્થુ ઉપકરણોની અંદર, ઇલેક્ટ્રિક મોટર્સ વૉશિંગ મશીન, વેક્યુમ ક્લીનર્સ, કમ્પ્યુટર્સ, હેર ડ્રાયર્સ, બાળકોના રમકડાં, ઘડિયાળો અને અન્ય ઘણા ઉપકરણો ચલાવે છે.

મૂળભૂત શારીરિક પ્રક્રિયાઓ અને ક્રિયાના સિદ્ધાંત
જ્યારે અંદર ખસેડવું ચુંબકીય ક્ષેત્ર ઇલેક્ટ્રિક ચાર્જ, જેને ઇલેક્ટ્રિક કરંટ કહેવામાં આવે છે, તેમાં હંમેશા યાંત્રિક બળ હોય છે જે ચુંબકીય ક્ષેત્રની રેખાઓના દિશા તરફ લંબરૂપ સમતલમાં તેમની દિશાને વિચલિત કરવાનું વલણ ધરાવે છે.જ્યારે ધાતુના વાયર અથવા તેનાથી બનેલા કોઇલમાંથી વિદ્યુત પ્રવાહ પસાર થાય છે, ત્યારે આ બળ દરેક વર્તમાન-વહન વાયર અને સમગ્ર કોઇલને ખસેડવા/ ફેરવવાનું વલણ ધરાવે છે.
નીચેનો ફોટો ધાતુની ફ્રેમ બતાવે છે જેમાં તેમાંથી પ્રવાહ વહે છે. તેના પર લાગુ ચુંબકીય ક્ષેત્ર ફ્રેમની દરેક શાખા માટે બળ F બનાવે છે, જે રોટેશનલ ગતિ બનાવે છે.

બંધ વાહક લૂપમાં ઇલેક્ટ્રોમોટિવ બળની રચનાના આધારે ઇલેક્ટ્રિક અને ચુંબકીય ઊર્જાની ક્રિયાપ્રતિક્રિયાની આ મિલકત દરેક ઇલેક્ટ્રિક મોટર પર કાર્યરત છે. તેની ડિઝાઇનમાં શામેલ છે:
-
કોઇલ જેના દ્વારા ઇલેક્ટ્રિક પ્રવાહ વહે છે. તે વિશિષ્ટ એન્કર કોર પર મૂકવામાં આવે છે અને ઘર્ષણ બળોના પ્રતિકારને ઘટાડવા માટે રોટરી બેરિંગ્સમાં નિશ્ચિત કરવામાં આવે છે. આ ડિઝાઇનને રોટર કહેવામાં આવે છે;
-
સ્ટેટર, જે ચુંબકીય ક્ષેત્ર બનાવે છે, જે તેના બળની રેખાઓ સાથે રોટર વિન્ડિંગના વળાંક સાથે પસાર થતા ઇલેક્ટ્રિક ચાર્જમાં પ્રવેશ કરે છે;
-
સ્ટેટર મૂકવા માટે આવાસ. શરીરની અંદર, ખાસ બેઠકો બનાવવામાં આવે છે, જેની અંદર રોટર બેરિંગ્સના બાહ્ય પાંજરા માઉન્ટ થયેલ છે.
સૌથી સરળ ઇલેક્ટ્રિક મોટરની સરળ ડિઝાઇન નીચેના ફોર્મના ચિત્ર દ્વારા રજૂ કરી શકાય છે.

જ્યારે રોટર ફરે છે, ત્યારે ટોર્ક જનરેટ થાય છે, જેની શક્તિ ઉપકરણની સામાન્ય ડિઝાઇન, લાગુ વિદ્યુત ઊર્જાની માત્રા અને રૂપાંતરણ દરમિયાન તેના નુકસાન પર આધારિત છે.
મોટરની મહત્તમ સંભવિત ટોર્ક શક્તિની તીવ્રતા હંમેશા તેના પર લાગુ થતી વિદ્યુત ઊર્જા કરતાં ઓછી હોય છે. તે કાર્યક્ષમતા મૂલ્ય દ્વારા વર્ગીકૃત થયેલ છે.
ઇલેક્ટ્રિક મોટર્સના પ્રકાર
કોઇલમાંથી વહેતા પ્રવાહના પ્રકાર અનુસાર, તેને ડીસી અથવા એસી મોટર્સમાં વિભાજિત કરવામાં આવે છે.આ બે જૂથોમાંના દરેકમાં વિવિધ તકનીકી પ્રક્રિયાઓનો ઉપયોગ કરીને મોટી સંખ્યામાં ફેરફારો છે.
ડીસી મોટર્સ
તેમની પાસે સ્થિર સ્થિર દ્વારા બનાવેલ સ્ટેટર ચુંબકીય ક્ષેત્ર છે કાયમી ચુંબક અથવા ઉત્તેજના કોઇલ સાથે વિશિષ્ટ ઇલેક્ટ્રોમેગ્નેટ. આર્મેચર કોઇલ શાફ્ટમાં નિશ્ચિતપણે માઉન્ટ થયેલ છે, જે બેરિંગ્સમાં નિશ્ચિત છે અને તેની પોતાની ધરીની આસપાસ મુક્તપણે ફેરવી શકે છે.
આવા એન્જિનની મૂળભૂત રચના આકૃતિમાં બતાવવામાં આવી છે.

આર્મચરના કોર પર, ફેરોમેગ્નેટિક સામગ્રીઓથી બનેલા, ત્યાં એક કોઇલ હોય છે જેમાં બે શ્રેણી-જોડાયેલા ભાગો હોય છે, જે એક છેડે વાહક કલેક્ટર પ્લેટો સાથે જોડાયેલા હોય છે અને બીજા છેડે એકબીજા સાથે જોડાયેલા હોય છે. બે ગ્રેફાઇટ પીંછીઓ આર્મચરની વિરુદ્ધ છેડા પર સ્થિત છે અને કલેક્ટર પ્લેટોના સંપર્ક પેડ્સ સામે દબાવવામાં આવે છે.
સકારાત્મક DC સ્ત્રોત પોટેન્શિયલ નીચલા પેટર્નના બ્રશ પર લાગુ થાય છે અને ઉપરના એક પર નકારાત્મક સંભવિત. કોઇલમાંથી વહેતા પ્રવાહની દિશા ડેશવાળા લાલ તીર દ્વારા બતાવવામાં આવે છે.
વર્તમાન ચુંબકીય ક્ષેત્રને આર્મેચરની નીચે ડાબી બાજુએ ઉત્તર ધ્રુવ અને આર્મેચરની ઉપર જમણી બાજુએ દક્ષિણ ધ્રુવ (ગિમ્બલ નિયમ)નું કારણ બને છે. આના પરિણામે સમાન નામના સ્થિર ધ્રુવોમાંથી રોટર ધ્રુવોને ભગાડવામાં આવે છે અને સ્ટેટરના વિરોધી ધ્રુવો તરફ આકર્ષાય છે. લાગુ બળના પરિણામે, રોટેશનલ ચળવળ થાય છે, જેની દિશા ભૂરા તીર દ્વારા સૂચવવામાં આવે છે.
જડતા દ્વારા આર્મેચરના વધુ પરિભ્રમણ સાથે, ધ્રુવો અન્ય કલેક્ટર પ્લેટોમાં સ્થાનાંતરિત થાય છે. તેમાંના પ્રવાહની દિશા ઉલટી છે. રોટર વધુ ફેરવવાનું ચાલુ રાખે છે.
આવા કલેક્ટર ઉપકરણની સરળ ડિઝાઇન વિદ્યુત ઊર્જાના મોટા નુકસાન તરફ દોરી જાય છે.આવી મોટરો બાળકો માટે સરળ ડિઝાઇન અથવા રમકડાંના ઉપકરણોમાં કામ કરે છે.
ઉત્પાદન પ્રક્રિયામાં સામેલ ડાયરેક્ટ વર્તમાન ઇલેક્ટ્રિક મોટર્સ વધુ જટિલ ડિઝાઇન ધરાવે છે:
-
કોઇલ બે ભાગમાં નહીં, પરંતુ કેટલાક ભાગોમાં વહેંચાયેલું છે;
-
કોઇલનો દરેક વિભાગ તેના પોતાના ધ્રુવ પર માઉન્ટ થયેલ છે;
-
કલેક્ટર ઉપકરણ વિન્ડિંગ્સની સંખ્યા અનુસાર ચોક્કસ સંખ્યામાં સંપર્ક પેડ્સ સાથે બનાવવામાં આવે છે.
પરિણામે, દરેક ધ્રુવનું તેની કોન્ટેક્ટ પ્લેટ્સ દ્વારા પીંછીઓ અને વર્તમાન સ્ત્રોત સાથે એક સરળ કનેક્શન બનાવવામાં આવે છે અને ઊર્જાનું નુકસાન ઓછું થાય છે.
આવા એન્કરનું ઉપકરણ ફોટામાં બતાવવામાં આવ્યું છે.
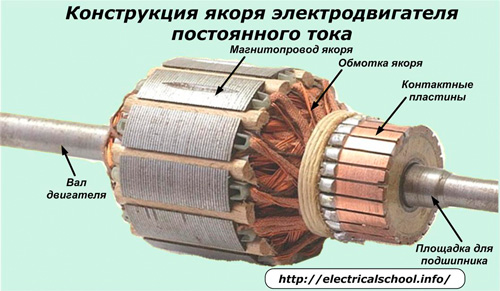
ડીસી મોટર્સમાં, રોટરના પરિભ્રમણની દિશા ઉલટાવી શકાય છે. આ કરવા માટે, સ્ત્રોત પર ધ્રુવીયતાને બદલીને કોઇલમાં વર્તમાનની હિલચાલને વિરુદ્ધમાં બદલવા માટે તે પૂરતું છે.
એસી મોટર્સ
તેઓ અગાઉની ડિઝાઇનથી અલગ છે જેમાં તેમના કોઇલમાં વહેતા ઇલેક્ટ્રિક પ્રવાહનું વર્ણન કરવામાં આવ્યું છે sinusoidal હાર્મોનિક કાયદોસમયાંતરે તેની દિશા (ચિહ્ન) બદલતા રહે છે. તેમને શક્તિ આપવા માટે, વૈકલ્પિક સંકેતો સાથે જનરેટરમાંથી વોલ્ટેજ પૂરો પાડવામાં આવે છે.
આવા મોટર્સના સ્ટેટર ચુંબકીય સર્કિટ દ્વારા કરવામાં આવે છે. તે ગ્રુવ્સ સાથે ફેરોમેગ્નેટિક પ્લેટ્સથી બનેલું છે જેમાં કોઇલના વળાંકને ફ્રેમ (કોઇલ) રૂપરેખાંકન સાથે મૂકવામાં આવે છે.

સિંક્રનસ ઇલેક્ટ્રિક મોટર્સ
નીચેનો ફોટો રોટર અને સ્ટેટરના ઇલેક્ટ્રોમેગ્નેટિક ક્ષેત્રોના સિંક્રનસ રોટેશન સાથે સિંગલ-ફેઝ એસી મોટરના સંચાલનના સિદ્ધાંતને બતાવે છે.

સ્ટેટરના ચુંબકીય સર્કિટના ગ્રુવ્સમાં ડાયમેટ્રિકલી વિરુદ્ધ છેડે, વિન્ડિંગ વાયર મૂકવામાં આવે છે, જે એક ફ્રેમના સ્વરૂપમાં યોજનાકીય રીતે દર્શાવવામાં આવે છે જેના દ્વારા વૈકલ્પિક પ્રવાહ વહે છે.
ચાલો તેના અર્ધ-તરંગના સકારાત્મક ભાગના પસાર થવાને અનુરૂપ ક્ષણના કેસને ધ્યાનમાં લઈએ.
બેરિંગ કોષોમાં, બિલ્ટ-ઇન કાયમી ચુંબક સાથેનું રોટર મુક્તપણે ફરે છે, જેમાં ઉત્તરીય "N મુખ" અને ધ્રુવનું દક્ષિણ "S મુખ" સ્પષ્ટ રીતે વ્યાખ્યાયિત થયેલ છે. જ્યારે સ્ટેટર વિન્ડિંગમાંથી પ્રવાહની હકારાત્મક અર્ધ-તરંગ વહે છે, ત્યારે તેમાં ધ્રુવો «S st» અને «N st» સાથેનું ચુંબકીય ક્ષેત્ર બનાવવામાં આવે છે.
રોટર અને સ્ટેટરના ચુંબકીય ક્ષેત્રો વચ્ચે ક્રિયાપ્રતિક્રિયા દળો ઉદ્ભવે છે (ધ્રુવોને દૂર કરે છે અને ધ્રુવો આકર્ષે છે તેનાથી વિપરીત) જે મોટર આર્મેચરને કોઈપણ સ્થિતિમાંથી ચરમસીમા તરફ ફેરવવાનું વલણ ધરાવે છે જ્યારે વિરોધી ધ્રુવો એકબીજાની શક્ય તેટલી નજીક સ્થિત હોય છે. અન્ય
જો આપણે સમાન કેસને ધ્યાનમાં લઈએ, પરંતુ તે ક્ષણ માટે જ્યારે વિપરીત - વર્તમાનની નકારાત્મક અર્ધ-તરંગ ફ્રેમ વાયરમાંથી પસાર થાય છે, તો આર્મેચરનું પરિભ્રમણ વિરુદ્ધ દિશામાં થશે.
સ્ટેટરમાં રોટરની સતત હિલચાલને સુનિશ્ચિત કરવા માટે, એક વિન્ડિંગ ફ્રેમ બનાવવામાં આવતી નથી, પરંતુ તેમાંની ચોક્કસ સંખ્યા, જો કે તેમાંથી દરેક એક અલગ વર્તમાન સ્ત્રોત દ્વારા સંચાલિત છે.
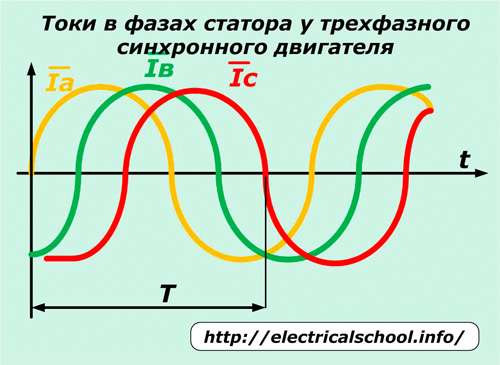
સિંક્રનસ પરિભ્રમણ સાથે ત્રણ-તબક્કાના એસી મોટરના કાર્ય સિદ્ધાંત, રોટર અને સ્ટેટરના ઇલેક્ટ્રોમેગ્નેટિક ક્ષેત્રો નીચેના ચિત્રમાં બતાવવામાં આવ્યા છે.

આ ડિઝાઇનમાં, ત્રણ કોઇલ A, B અને C સ્ટેટર મેગ્નેટિક સર્કિટની અંદર માઉન્ટ થયેલ છે, જે એકબીજાને 120 ડિગ્રીના ખૂણાઓ દ્વારા સરભર કરે છે. કોઇલ A પીળા ચિહ્નિત થયેલ છે, B લીલો છે, અને C લાલ છે. દરેક કોઇલ અગાઉના કેસની જેમ જ ફ્રેમ્સ સાથે બનાવવામાં આવે છે.
ચિત્રમાં, કોઈ પણ સંજોગોમાં, પ્રવાહ ફક્ત એક જ કોઇલમાંથી આગળ અથવા વિપરીત દિશામાં વહે છે, જે «+» અને «-« ચિહ્નો દ્વારા સૂચવવામાં આવે છે.
જ્યારે હકારાત્મક અર્ધ-તરંગ આગળની દિશામાં તબક્કા Aમાંથી પસાર થાય છે, ત્યારે રોટર ક્ષેત્રની ધરી આડી સ્થિતિ લે છે, કારણ કે સ્ટેટરના ચુંબકીય ધ્રુવો આ પ્લેનમાં રચાય છે અને જંગમ આર્મચરને આકર્ષે છે. રોટરના વિરોધી ધ્રુવો સ્ટેટરના ધ્રુવોની નજીક આવે છે.
જ્યારે હકારાત્મક હાફ વેવ તબક્કા C માં જાય છે, ત્યારે આર્મેચર 60 ડિગ્રી ઘડિયાળની દિશામાં ફેરવશે. એકવાર B તબક્કામાં કરંટ લાગુ થઈ જાય પછી, સમાન આર્મેચર પરિભ્રમણ થશે. આગામી વિન્ડિંગના આગલા તબક્કામાં દરેક અનુગામી વર્તમાન પ્રવાહ રોટરને ચાલુ કરશે.
જો દરેક વિન્ડિંગ પર 120 ડિગ્રીના ખૂણા દ્વારા ત્રણ તબક્કાના મુખ્ય વોલ્ટેજને સ્થાનાંતરિત કરવામાં આવે છે, તો વૈકલ્પિક પ્રવાહો તેમાં ફરશે, જે આર્મેચરને ફેરવશે અને લાગુ ઇલેક્ટ્રોમેગ્નેટિક ક્ષેત્ર સાથે તેનું સિંક્રનસ રોટેશન બનાવશે.
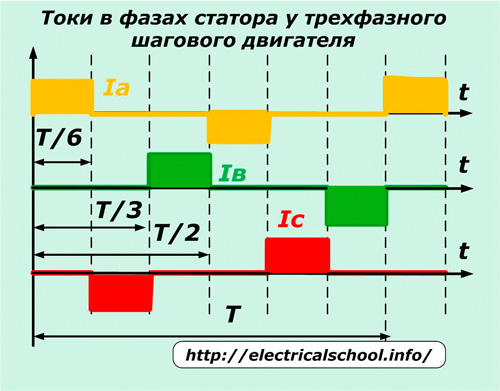
ત્રણ-તબક્કાની સ્ટેપર મોટરમાં સમાન યાંત્રિક ડિઝાઇનનો સફળતાપૂર્વક ઉપયોગ થાય છે... માત્ર નિયંત્રણ દ્વારા દરેક વિન્ડિંગમાં વિશેષ નિયંત્રક (સ્ટેપર મોટર ડ્રાઈવર) ઉપર વર્ણવેલ અલ્ગોરિધમ મુજબ સતત કઠોળ લાગુ અને દૂર કરવામાં આવે છે.
તેમનું સ્ટાર્ટ-અપ રોટેશનલ ચળવળ શરૂ કરે છે, અને સમયના ચોક્કસ બિંદુએ તેમની સમાપ્તિ શાફ્ટનું માપેલ પરિભ્રમણ અને ચોક્કસ તકનીકી કામગીરી કરવા માટે પ્રોગ્રામ કરેલ ખૂણા પર સ્ટોપ પ્રદાન કરે છે.
વર્ણવેલ બંને ત્રણ-તબક્કાની સિસ્ટમોમાં, આર્મેચરના પરિભ્રમણની દિશા બદલવી શક્ય છે. આ કરવા માટે, તમારે ફક્ત તબક્કાઓનો ક્રમ બદલવાની જરૂર છે «A» — «B» — «C» બીજામાં, ઉદાહરણ તરીકે «A» — «C» — «B».
રોટરની ઝડપ T સમયગાળાની લંબાઈ દ્વારા નિયંત્રિત થાય છે. તેનો ઘટાડો પરિભ્રમણના પ્રવેગ તરફ દોરી જાય છે.તબક્કામાં વર્તમાનના કંપનવિસ્તારની તીવ્રતા વિન્ડિંગના આંતરિક પ્રતિકાર અને તેના પર લાગુ વોલ્ટેજના મૂલ્ય પર આધારિત છે. તે ઇલેક્ટ્રિક મોટરના ટોર્ક અને પાવરની માત્રા નક્કી કરે છે.
અસુમેળ મોટર્સ
આ મોટર ડિઝાઇનમાં અગાઉ ચર્ચા કરાયેલા સિંગલ-ફેઝ અને થ્રી-ફેઝ મોડલ્સની જેમ વિન્ડિંગ્સ સાથે સમાન સ્ટેટર મેગ્નેટિક સર્કિટ હોય છે. તેઓ આર્મેચર અને સ્ટેટર ઇલેક્ટ્રોમેગ્નેટિક ક્ષેત્રોના અસુમેળ પરિભ્રમણથી તેમનું નામ મેળવે છે. આ રોટરના રૂપરેખાંકનમાં સુધારો કરીને કરવામાં આવે છે.
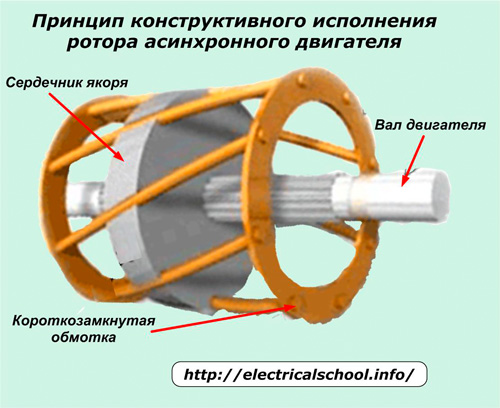
તેનો કોર ગ્રુવ્ડ ઇલેક્ટ્રિકલ સ્ટીલ પ્લેટ્સથી બનેલો છે. તેઓ એલ્યુમિનિયમ અથવા કોપર વર્તમાન વાહકથી સજ્જ છે, જે વાહક રિંગ્સ સાથે આર્મચરના છેડે બંધ છે.
જ્યારે સ્ટેટર વિન્ડિંગ્સ પર વોલ્ટેજ લાગુ કરવામાં આવે છે, ત્યારે ઇલેક્ટ્રોમોટિવ બળ દ્વારા રોટર વિન્ડિંગમાં ઇલેક્ટ્રિક પ્રવાહ પ્રેરિત થાય છે અને આર્મેચર ચુંબકીય ક્ષેત્ર બનાવવામાં આવે છે. જ્યારે આ ઇલેક્ટ્રોમેગ્નેટિક ક્ષેત્રો ક્રિયાપ્રતિક્રિયા કરે છે, ત્યારે મોટર શાફ્ટ ફેરવવાનું શરૂ કરે છે.
આ ડિઝાઇન સાથે, રોટરની હિલચાલ સ્ટેટરમાં ફરતા ઇલેક્ટ્રોમેગ્નેટિક ક્ષેત્રની ઘટના પછી જ શક્ય છે, અને તે તેની સાથે ઓપરેશનના અસુમેળ મોડમાં ચાલુ રહે છે.
અસુમેળ મોટરો ડિઝાઇનમાં સરળ છે. તેથી, તે સસ્તી છે અને ઔદ્યોગિક સ્થાપનો અને ઘરગથ્થુ ઉપકરણોમાં વ્યાપકપણે ઉપયોગમાં લેવાય છે.

ABB વિસ્ફોટ-પ્રૂફ ઇલેક્ટ્રિક મોટર
લીનિયર મોટર્સ
ઔદ્યોગિક મિકેનિઝમ્સની ઘણી કાર્યકારી સંસ્થાઓ એક વિમાનમાં પારસ્પરિક અથવા અનુવાદની હિલચાલ કરે છે, જે થાંભલાઓ ચલાવતી વખતે મેટલવર્કિંગ મશીનો, વાહનો, હથોડાના મારામારીના સંચાલન માટે જરૂરી છે ...
રોટરી ઇલેક્ટ્રિક મોટરમાંથી ગિયરબોક્સ, બોલ સ્ક્રૂ, બેલ્ટ ડ્રાઇવ અને સમાન યાંત્રિક ઉપકરણો દ્વારા આવા કાર્યકારી શરીરને ખસેડવું ડિઝાઇનને જટિલ બનાવે છે. આ સમસ્યાનો આધુનિક તકનીકી ઉકેલ એ રેખીય ઇલેક્ટ્રિક મોટરનું સંચાલન છે.
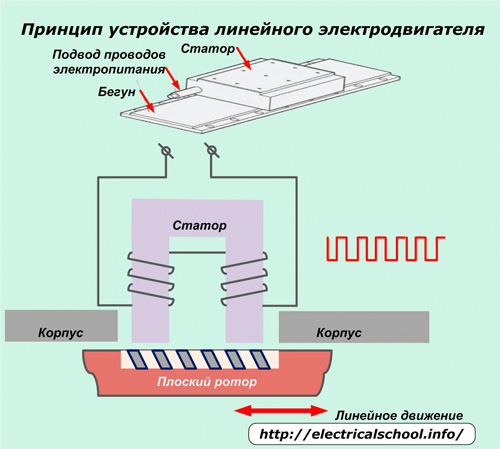
તેના સ્ટેટર અને રોટર રોટરી ઇલેક્ટ્રિક મોટર્સની જેમ રિંગ્સમાં ઘા કરવાને બદલે સ્ટ્રીપ્સના સ્વરૂપમાં વિસ્તરેલ હોય છે.
ઓપરેશનનો સિદ્ધાંત ચોક્કસ લંબાઈના ખુલ્લા ચુંબકીય સર્કિટ સાથે સ્થિર સ્ટેટરમાંથી ઇલેક્ટ્રોમેગ્નેટિક ઊર્જાના સ્થાનાંતરણને કારણે રનર રોટરને પારસ્પરિક રેખીય ગતિ પ્રદાન કરવાનો છે. ક્રમિક રીતે વર્તમાન ચાલુ કરીને તેની અંદર એક કાર્યકારી ચુંબકીય ક્ષેત્ર બનાવવામાં આવે છે.
તે કલેક્ટર સાથે આર્મેચર વિન્ડિંગ પર કાર્ય કરે છે. આવી મોટરમાં ઉદ્ભવતા દળો રોટરને માર્ગદર્શક તત્વો સાથે માત્ર એક રેખીય દિશામાં ખસેડે છે.
લીનિયર મોટર્સ સીધી વર્તમાન અથવા વૈકલ્પિક પ્રવાહ પર કામ કરવા માટે રચાયેલ છે અને સિંક્રનસ અથવા અસુમેળ મોડમાં કાર્ય કરી શકે છે.
રેખીય મોટર્સના ગેરફાયદા છે:
-
તકનીકીની જટિલતા;
-
ઊંચી કિંમત;
-
ઓછી ઉર્જા કાર્યક્ષમતા.