વિદ્યુત માપન સાધનોનું વર્ગીકરણ, ઇન્સ્ટ્રુમેન્ટ સ્કેલ પ્રતીકો
વિદ્યુત સ્થાપનોના યોગ્ય સંચાલનને નિયંત્રિત કરવા, તેનું પરીક્ષણ કરવા, વિદ્યુત સર્કિટના પરિમાણો નક્કી કરવા, વિદ્યુત ઊર્જાનો વપરાશ રેકોર્ડ કરવા વગેરે માટે, વિવિધ વિદ્યુત માપન કરવામાં આવે છે. કોમ્યુનિકેશન ટેક્નોલોજીમાં, આધુનિક ટેક્નોલોજીની જેમ, વિદ્યુત માપન આવશ્યક છે. ઉપકરણો કે જેની સાથે વિવિધ વિદ્યુત જથ્થાઓ માપવામાં આવે છે: વર્તમાન, વોલ્ટેજ, પ્રતિકાર, શક્તિ, વગેરે, તેને વિદ્યુત માપન સાધનો કહેવામાં આવે છે.
પેનલ એમીટર:
ત્યાં મોટી સંખ્યામાં વિવિધ વિદ્યુત મીટર છે. નીચેનાનો મોટાભાગે વિદ્યુત માપનના ઉત્પાદનમાં ઉપયોગ થાય છે: એમીટર, વોલ્ટમીટર, ગેલ્વેનોમીટર, વોટમીટર, વિદ્યુત માપન ઉપકરણો, તબક્કા મીટર, તબક્કા સૂચકાંકો, સિંક્રોસ્કોપ્સ, ફ્રીક્વન્સી મીટર, ઓહ્મમીટર, મેગોહમિટર, ગ્રાઉન્ડ રેઝિસ્ટન્સ, કેપેસીટન્સ અને ઇન્ડક્ટોસ્કોપ માપન પુલ, સંયોજન સાધનો અને માપન સેટ.
ઓસિલોસ્કોપ:

વિદ્યુત માપન સેટ K540 (વોલ્ટમીટર, એમીટર અને વોટમીટરનો સમાવેશ થાય છે):

ઓપરેશનના સિદ્ધાંત અનુસાર ઇલેક્ટ્રિક ટૂલ્સનું વર્ગીકરણ
ઓપરેશનના સિદ્ધાંત અનુસાર, વિદ્યુત માપન ઉપકરણોને નીચેના મુખ્ય પ્રકારોમાં વિભાજિત કરવામાં આવે છે:
1. સ્થાયી ચુંબક દ્વારા બનાવેલ વર્તમાન અને બાહ્ય ચુંબકીય ક્ષેત્ર સાથે કોઇલની ક્રિયાપ્રતિક્રિયાના સિદ્ધાંત પર આધારિત મેગ્નેટોઇલેક્ટ્રિક સિસ્ટમના ઉપકરણો.
2. પ્રવાહો સાથે બે કોઇલની ઇલેક્ટ્રોડાયનેમિક ક્રિયાપ્રતિક્રિયાના સિદ્ધાંત પર આધારિત ઇલેક્ટ્રોડાયનેમિક સિસ્ટમ માટે NSટૂલ્સ, જેમાંથી એક સ્થિર છે અને અન્ય જંગમ છે.
3. ઇલેક્ટ્રોમેગ્નેટિક સિસ્ટમના ઉપકરણો, જેમાં વર્તમાન સાથે સ્થિર કોઇલના ચુંબકીય ક્ષેત્રની ક્રિયાપ્રતિક્રિયાના સિદ્ધાંત અને આ ક્ષેત્ર દ્વારા ચુંબકિત જંગમ આયર્ન પ્લેટનો ઉપયોગ થાય છે.
4. ઇલેક્ટ્રિક પ્રવાહની થર્મલ અસરનો ઉપયોગ કરીને થર્મોમેઝરિંગ ઉપકરણો. વર્તમાન દ્વારા ગરમ થયેલ વાયર વિસ્તરે છે, નીચે અટકી જાય છે અને પરિણામે, ઉપકરણના જંગમ ભાગને વસંતની ક્રિયા હેઠળ ફેરવી શકાય છે, જે વાયરમાં પરિણામી સ્લેકને દૂર કરે છે.
5. જંગમ મેટલ સિલિન્ડરમાં આ ક્ષેત્ર દ્વારા પ્રેરિત પ્રવાહો સાથે ફરતા ચુંબકીય ક્ષેત્રની ક્રિયાપ્રતિક્રિયાના સિદ્ધાંત પર આધારિત ઇન્ડક્શન સિસ્ટમના ઉપકરણો.
6. વિપરિત ઇલેક્ટ્રીક ચાર્જ સાથે ચાર્જ થયેલ જંગમ અને સ્થાવર મેટલ પ્લેટની ક્રિયાપ્રતિક્રિયાના સિદ્ધાંત પર આધારિત ઇલેક્ટ્રોસ્ટેટિક સિસ્ટમ ઉપકરણો.
7. થર્મોઇલેક્ટ્રિક સિસ્ટમ ઉપકરણો કે જે મેગ્નેટોઇલેક્ટ્રિક સિસ્ટમ જેવા કેટલાક સંવેદનશીલ ઉપકરણ સાથે થર્મોકોપલનું સંયોજન છે. થર્મોકોપલમાંથી પસાર થતો માપેલ પ્રવાહ મેગ્નેટોઈલેક્ટ્રીક ઉપકરણ પર કામ કરતા થર્મલ પ્રવાહના દેખાવમાં ફાળો આપે છે.
8.વાઇબ્રેટિંગ બોડીના મિકેનિકલ રેઝોનન્સના સિદ્ધાંત પર આધારિત વાઇબ્રેશન સિસ્ટમ ડિવાઇસ. આપેલ વર્તમાન આવર્તન પર, ઇલેક્ટ્રોમેગ્નેટનું એક આર્મચર સૌથી વધુ તીવ્રપણે વાઇબ્રેટ કરે છે, જેનો કુદરતી ઓસિલેશનનો સમયગાળો લાદવામાં આવેલા ઓસિલેશનના સમયગાળા સાથે એકરુપ હોય છે.
9. ઇલેક્ટ્રોનિક માપન ઉપકરણો - ઉપકરણો કે જેના માપન સર્કિટમાં ઇલેક્ટ્રોનિક ઘટકો હોય છે. તેનો ઉપયોગ લગભગ તમામ વિદ્યુત જથ્થાઓને માપવા માટે થાય છે, તેમજ બિન-વિદ્યુત જથ્થાને જે વિદ્યુતમાં રૂપાંતરિત કરવામાં આવ્યા છે.
વાંચન ઉપકરણના પ્રકાર અનુસાર, એનાલોગ અને ડિજિટલ ઉપકરણોને અલગ પાડવામાં આવે છે. એનાલોગ સાધનોમાં, માપેલ અથવા પ્રમાણસર મૂલ્ય મૂવિંગ ભાગની સ્થિતિને સીધી અસર કરે છે કે જેના પર વાંચન ઉપકરણ સ્થિત છે. ડિજિટલ ઉપકરણોમાં, મૂવિંગ ભાગ ગેરહાજર છે અને માપેલ અથવા પ્રમાણસર મૂલ્ય ડિજિટલ સૂચક સાથે રેકોર્ડ કરેલ સંખ્યાત્મક સમકક્ષમાં રૂપાંતરિત થાય છે.
ઇન્ડક્શન મીટર:

મોટાભાગની વિદ્યુત માપન પદ્ધતિઓમાં ગતિશીલ ભાગનું વિચલન તેમના વિન્ડિંગ્સમાં પ્રવાહોના મૂલ્યો પર આધારિત છે. પરંતુ એવા કિસ્સાઓમાં કે જ્યાં મિકેનિઝમ એ એવા જથ્થાને માપવા માટે સેવા આપવી જોઈએ જે વર્તમાન (પ્રતિરોધકતા, ઇન્ડક્ટન્સ, કેપેસીટન્સ, ફેઝ શિફ્ટ, ફ્રીક્વન્સી, વગેરે) નું સીધું કાર્ય નથી, તે જરૂરી છે કે પરિણામી ટોર્ક માપેલા જથ્થા પર આધારિત હોય અને સપ્લાય વોલ્ટેજથી સ્વતંત્ર.
આવા માપન માટે, એક પદ્ધતિનો ઉપયોગ કરવામાં આવે છે, જેમાંથી ફરતા ભાગનું વિચલન ફક્ત તેના બે વિન્ડિંગ્સમાં પ્રવાહોના ગુણોત્તર દ્વારા નક્કી કરવામાં આવે છે અને તે તેમના મૂલ્યો પર આધારિત નથી. આ સામાન્ય સિદ્ધાંત અનુસાર બાંધવામાં આવેલા ઉપકરણોને રેશિયો કહેવામાં આવે છે.કોઈપણ વિદ્યુત માપન પ્રણાલીના ગુણોત્તરમેટ્રિક મિકેનિઝમને લાક્ષણિકતા સાથે બાંધવું શક્ય છે - ઝરણા અથવા સ્ટ્રાઇના ટોર્સિયન દ્વારા બનાવવામાં આવેલ યાંત્રિક પ્રતિરોધક ક્ષણની ગેરહાજરી.
વોલ્ટમીટર દંતકથા:

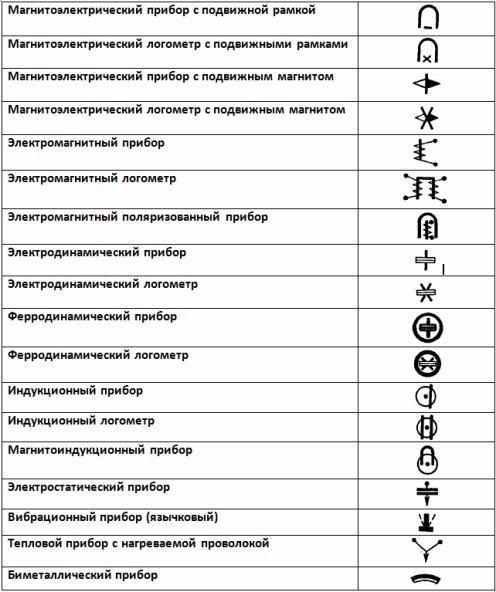
નીચેના આંકડાઓ તેમના કાર્યના સિદ્ધાંત અનુસાર વિદ્યુત મીટરના પ્રતીકો દર્શાવે છે.
ઉપકરણના સંચાલનના સિદ્ધાંતનું નિર્ધારણ
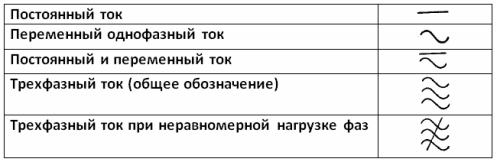
વર્તમાન પ્રકાર હોદ્દો
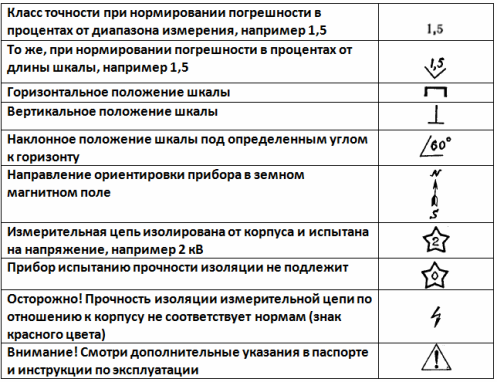
ચોકસાઈ વર્ગ, ઉપકરણની સ્થિતિ, ઇન્સ્યુલેશન શક્તિ, પ્રભાવિત જથ્થા માટે હોદ્દો
માપેલા જથ્થાના પ્રકાર અનુસાર વિદ્યુત માપન ઉપકરણોનું વર્ગીકરણ
વિદ્યુત મીટરનું વર્ગીકરણ તેઓ જે જથ્થાને માપે છે તેના આધારે કરવામાં આવે છે, કારણ કે ઓપરેશનના સમાન સિદ્ધાંત સાથેના સાધનો, પરંતુ વિવિધ જથ્થાને માપવા માટે રચાયેલ છે, તેમના બાંધકામમાં એકબીજાથી મોટા પ્રમાણમાં અલગ હોઈ શકે છે, ઉપકરણ પર સ્કેલનો ઉલ્લેખ ન કરવો.
કોષ્ટક 1 સૌથી સામાન્ય વિદ્યુત મીટર માટે પ્રતીકોની સૂચિ બતાવે છે.
કોષ્ટક 1. માપન એકમો, તેમના ગુણાંક અને સબસેટ્સના હોદ્દાનાં ઉદાહરણો
નામ હોદ્દો નામ હોદ્દો Kiloampere kA પાવર ફેક્ટર cos φ એમ્પીયર એ રિએક્ટિવ પાવર ફેક્ટર sin φ મિલિએમ્પીયર mA થેરાઓહમ TΩ માઇક્રોએમ્પીયર μA મેગાઓહ્મ MΩ કિલોવોલ્ટ kV કિલોહ્મ kΩ વોલ્ટ V ઓહ્મ Ω મિલિવોલ્ટ mΩ વોલ્ટ V ઓહ્મ Ω મિલિવોલ્ટ MVWt MVWt MVW મિલો વેબર એમડબલ્યુબી વોટ ડબલ્યુ માઇક્રોફારાડ એમએફ મેગાવર એમવીએઆર પિકોફારાડ pF કિલોવર kVAR હેનરી એચ વર VAR મિલહેનરી mH મેગાહર્ટ્ઝ મેગાહર્ટ્ઝ માઇક્રોહેનરી µH KHz kHz તાપમાન સ્કેલ ડિગ્રી સેલ્સિયસ o° સે હર્ટ્ઝ હર્ટ્ઝ
તબક્કા કોણ φo ની ડિગ્રી
ચોકસાઈની ડિગ્રી અનુસાર વિદ્યુત માપન સાધનોનું વર્ગીકરણ
ઉપકરણની સંપૂર્ણ ભૂલ એ ઉપકરણના વાંચન અને માપેલ મૂલ્યના સાચા મૂલ્ય વચ્ચેનો તફાવત છે.
ઉદાહરણ તરીકે, એમીટરની સંપૂર્ણ ભૂલ છે
δ = I — aiH,
જ્યાં δ ("ડેલ્ટા" વાંચો) — એમ્પીયરમાં સંપૂર્ણ ભૂલ, Az — એમ્પીયરમાં મીટર રીડિંગ, Azd — એમ્પીયરમાં માપેલા વર્તમાનનું સાચું મૂલ્ય.
જો I > Azd, તો ઉપકરણની સંપૂર્ણ ભૂલ હકારાત્મક છે, અને જો હું < I, તો તે નકારાત્મક છે.
ઉપકરણ સુધારણા એ મૂલ્ય છે જે માપેલ મૂલ્યનું સાચું મૂલ્ય મેળવવા માટે ઉપકરણ વાંચનમાં ઉમેરવું આવશ્યક છે.
Aze = I — δ = I + (-δ)
તેથી, ઉપકરણનું કરેક્શન એ ઉપકરણની સંપૂર્ણ સંપૂર્ણ ભૂલનું મૂલ્ય છે, પરંતુ સાઇન ઇન તેની વિરુદ્ધ છે. ઉદાહરણ તરીકે, જો એમીટર 1 = 5 A બતાવે છે, અને ઉપકરણની સંપૂર્ણ ભૂલ δ= 0.1 a છે, તો માપેલ મૂલ્યનું સાચું મૂલ્ય I = 5+ (-0.1) = 4.9 a છે.
ઉપકરણની ઘટાડેલી ભૂલ એ ઉપકરણ સૂચક (ઉપકરણનું નામાંકિત વાંચન) ના સૌથી મોટા સંભવિત વિચલન માટે સંપૂર્ણ ભૂલનો ગુણોત્તર છે.
ઉદાહરણ તરીકે, એમીટર માટે
β = (δ / In) 100% = ((I — INS) / In) 100%
જ્યાં β — ટકામાં ભૂલ ઘટી છે, In એ સાધનનું નામાંકિત વાંચન છે.
ઉપકરણની ચોકસાઈ તેની મહત્તમ ઘટાડેલી ભૂલના મૂલ્ય દ્વારા વર્ગીકૃત થયેલ છે. GOST 8.401-80 મુજબ, ઉપકરણોને તેમની ચોકસાઈ વર્ગોની ડિગ્રી અનુસાર 9 માં વિભાજિત કરવામાં આવે છે: 0.02, 0.05, 0.1, 0.2, 0.5, 1.0, 1.5, 2.5 અને 4,0. ઉદાહરણ તરીકે, જો આ ઉપકરણમાં 1.5 ની ચોકસાઈ વર્ગ છે, તો તેનો અર્થ એ છે કે તેની મહત્તમ ઘટાડેલી ભૂલ 1.5% છે.
સચોટતા વર્ગો 0.02, 0.05, 0.1 અને 0.2 સાથેના ઇલેક્ટ્રિક મીટરનો ઉપયોગ સૌથી વધુ સચોટ તરીકે થાય છે, જ્યાં ખૂબ ઊંચી માપન ચોકસાઈની જરૂર હોય છે. જો ઉપકરણમાં 4% થી વધુની ભૂલ ઓછી હોય, તો તેને વર્ગની બહાર ગણવામાં આવે છે.
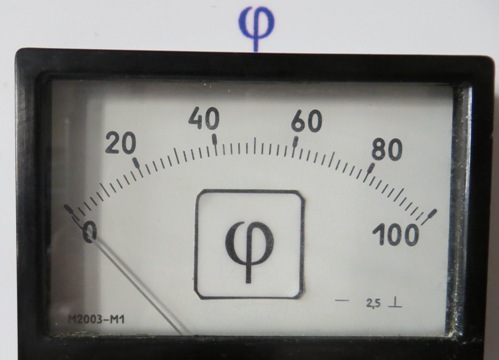
ચોકસાઈ વર્ગ 2.5 સાથે તબક્કો કોણ માપવાનું સાધન:
માપન ઉપકરણની સંવેદનશીલતા અને સ્થિરતા
ઉપકરણની સંવેદનશીલતા એ માપેલ મૂલ્યના એકમ દીઠ ઉપકરણના નિર્દેશકની કોણીય અથવા રેખીય હિલચાલનો ગુણોત્તર છે.જો ઉપકરણ સ્કેલ સમાન છે, તો પછી સમગ્ર સ્કેલ પર તેની સંવેદનશીલતા સમાન છે.
ઉદાહરણ તરીકે, સમાન સ્કેલ સાથે એમ્મીટરની સંવેદનશીલતા સૂત્ર દ્વારા નક્કી કરવામાં આવે છે
S = Δα / ΔI,
જ્યાં C — એમ્પીયર વિભાગોમાં એમીટરની સંવેદનશીલતા, ΔAz — એમ્પીયર અથવા મિલિઅમ્પિયર્સમાં વર્તમાન વધારો, Δα — ડિગ્રી અથવા મિલીમીટરમાં ઉપકરણ સૂચકના કોણીય વિસ્થાપનમાં વધારો.
જો ઉપકરણનો સ્કેલ અસમાન હોય, તો સ્કેલના વિવિધ ક્ષેત્રોમાં ઉપકરણની સંવેદનશીલતા અલગ હોય છે, કારણ કે સમાન વધારો (ઉદાહરણ તરીકે, વર્તમાન) સૂચકના કોણીય અથવા રેખીય વિસ્થાપનના વિવિધ પગલાઓને અનુરૂપ હશે. સાધન
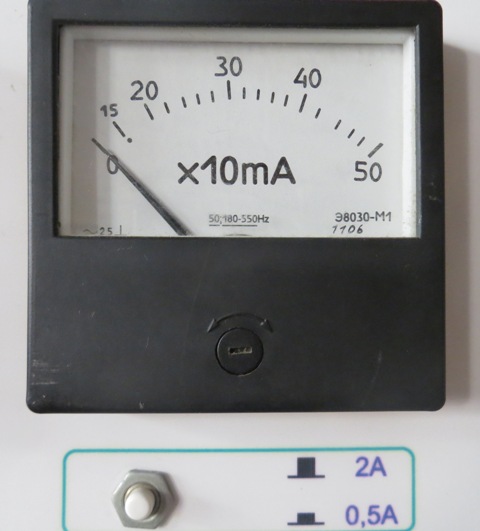
સાધનની પારસ્પરિક સંવેદનશીલતાને સાધન સ્થિર કહેવામાં આવે છે. તેથી ઉપકરણ સ્થિરાંક એ ઉપકરણની એકમ કિંમત છે, અથવા, અન્ય શબ્દોમાં, મૂલ્ય કે જેના દ્વારા માપેલ મૂલ્ય મેળવવા માટે વિભાગોમાં સ્કેલ વાંચનનો ગુણાકાર કરવો આવશ્યક છે.
ઉદાહરણ તરીકે, જો ઉપકરણનો સ્થિરાંક 10 mA/div (વિભાગ દીઠ દસ મિલીઅમ્પ્સ) હોય, તો જ્યારે તેનો નિર્દેશક α = 10 વિભાગોમાંથી વિચલિત થાય છે, ત્યારે માપેલ વર્તમાન મૂલ્ય I = 10 · 10 = 100 mA છે.
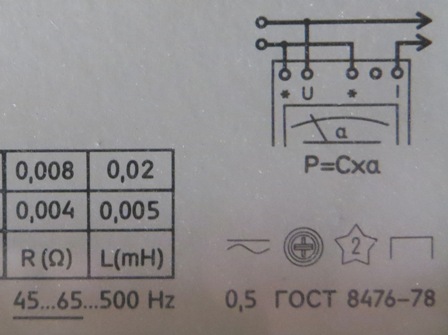
વોટમીટર:
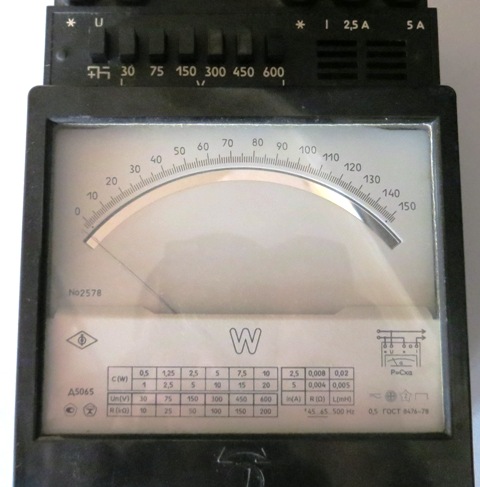
વોટમીટર કનેક્શન ડાયાગ્રામ અને ઉપકરણના હોદ્દા (સ્કેલની આડી સ્થિતિ સાથે ચલ અને સ્થિર શક્તિને માપવા માટેનું ફેરોડાયનેમિક ઉપકરણ, માપન સર્કિટ કેસથી અલગ છે અને પરીક્ષણ કરેલ વોલ્ટેજ 2 kV છે, ચોકસાઈ વર્ગ 0.5 છે):
માપન સાધનોનું માપાંકન — એક બીજા સાથે વ્યક્તિગત સ્કેલ મૂલ્યોના વિવિધ સંયોજનોની તુલના કરીને સાધનના સ્કેલ મૂલ્યોના સમૂહ માટે ભૂલો અથવા સુધારાઓ નક્કી કરવા. સરખામણી સ્કેલ મૂલ્યોમાંથી એક પર આધારિત છે.ચોકસાઇ મેટ્રોલોજી કાર્યની પ્રેક્ટિસમાં માપાંકનનો વ્યાપકપણે ઉપયોગ થાય છે.
માપાંકિત કરવાની સૌથી સરળ રીત એ છે કે દરેક કદને નજીવા સમાન (વાજબી રીતે યોગ્ય) કદ સાથે સરખાવવું. આ ખ્યાલને માપવાના સાધનોના ગ્રેજ્યુએશન (કેલિબ્રેશન) સાથે ભેળસેળ ન થવી જોઈએ (જેમ કે ઘણીવાર કરવામાં આવે છે), જે એક મેટ્રોલોજિકલ ઓપરેશન છે જેના દ્વારા માપન સાધનના સ્કેલ વિભાગોને માપના ચોક્કસ એકમોમાં વ્યક્ત મૂલ્યો આપવામાં આવે છે.
ઉપકરણોમાં પાવર લોસ
વિદ્યુત માપન ઉપકરણો ઓપરેશન દરમિયાન ઊર્જા વાપરે છે, જે સામાન્ય રીતે ગરમી ઊર્જામાં રૂપાંતરિત થાય છે. પાવર લોસ સર્કિટમાંના મોડ તેમજ સિસ્ટમ અને ઉપકરણની ડિઝાઇન પર આધારિત છે.
જો માપેલી શક્તિ પ્રમાણમાં નાની હોય, અને તેથી સર્કિટમાં વર્તમાન અથવા વોલ્ટેજ પ્રમાણમાં નાનું હોય, તો ઉપકરણોમાં ઊર્જાની શક્તિનું નુકસાન પોતે અભ્યાસ હેઠળના સર્કિટના મોડને નોંધપાત્ર રીતે અસર કરી શકે છે, અને ઉપકરણોના રીડિંગ્સમાં ઘટાડો થઈ શકે છે. તદ્દન મોટી ભૂલ. સર્કિટમાં સચોટ માપન માટે જ્યાં વિકસિત શક્તિઓ પ્રમાણમાં નાની હોય છે, તે ઉપકરણોમાં ઊર્જાના નુકસાનની તાકાત જાણવી જરૂરી છે.
કોષ્ટક 2 વિવિધ વિદ્યુત મીટર સિસ્ટમોમાં ઉર્જા પાવર નુકસાનના સરેરાશ મૂલ્યો દર્શાવે છે.
ઇન્સ્ટ્રુમેન્ટેશન સિસ્ટમ વોલ્ટમીટર 100 V, W Ammeters 5A, W મેગ્નેટોઇલેક્ટ્રિક 0.1 — 1.0 0.2 — 0.4 ઇલેક્ટ્રોમેગ્નેટિક 2.0 — 5.0 2.0 — 8.0 ઇન્ડક્શન 2.0 — 5.0 1.0 — 4.0 ઈલેક્ટ્રોડાયિન — 5.0 1.0 — 4.0 ઈલેક્ટ્રોડીના — 20.0 2.0 — 3.0