સેન્સર કનેક્શન ડાયાગ્રામ
સેન્સરના કનેક્શન ડાયાગ્રામ, વધુ સામાન્ય રીતે કહેવાય છે માપન સર્કિટ, સેન્સરના આઉટપુટ મૂલ્યને કન્વર્ટ કરવા માટે રચાયેલ છે, અને મોટાભાગના કિસ્સાઓમાં આ તેમના આંતરિક પ્રતિકારમાં ફેરફાર છે, તેના અનુગામી ઉપયોગ માટે વધુ અનુકૂળ મૂલ્યમાં. નિયમ પ્રમાણે, આ એક વિદ્યુત પ્રવાહ અથવા વોલ્ટેજમાં ફેરફાર છે જે કાં તો વિદ્યુત માપન ઉપકરણનો ઉપયોગ કરીને સીધો જ નિર્ધારિત કરી શકાય છે અથવા, વિસ્તૃત કર્યા પછી, યોગ્ય એક્ટ્યુએટર અથવા રેકોર્ડિંગ ઉપકરણને ખવડાવી શકાય છે.

આ હેતુઓ માટે, નીચેની સ્વિચિંગ યોજનાઓનો વ્યાપકપણે ઉપયોગ થાય છે:
-
સુસંગત,
-
પેવમેન્ટ
-
વિભેદક
-
વળતર
ક્રમિક સર્કિટ ડાયાગ્રામ DC અથવા AC સ્ત્રોત, Rx સેન્સર પોતે, એક માપન ઉપકરણ અથવા ડાયરેક્ટ ડ્રાઇવ મિકેનિઝમ અને સામાન્ય રીતે વધારાની પ્રતિકાર Rd જે આ સર્કિટમાં વર્તમાનને મર્યાદિત કરે છે (ફિગ. 1) નો સમાવેશ થાય છે. આવા સ્વિચિંગ સર્કિટનો વ્યાપકપણે ઉપયોગ ફક્ત સંપર્ક સેન્સર સાથે થાય છે જેના માટે Rx = 0 અથવા Rx = ?.
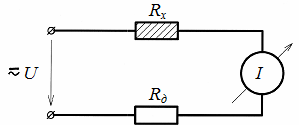
ચોખા. 1. કનેક્ટિંગ સેન્સર્સ માટે સીરીયલ સર્કિટ
કારણ કે માપન ઉપકરણના સર્કિટમાં અન્ય સેન્સર સાથે કામ કરતી વખતે, I = U /(Rx + Rd) અભિવ્યક્તિ દ્વારા નિર્ધારિત ઇલેક્ટ્રિક પ્રવાહ હંમેશા વહે છે, અને સેન્સરના આંતરિક પ્રતિકારમાં થોડો ફેરફાર ખૂબ જ નાનો ફેરફાર તરફ દોરી જાય છે. આ વર્તમાનમાં. પરિણામે, માપન ઉપકરણના સ્કેલના લઘુત્તમ વિભાગનો ઉપયોગ થાય છે, અને માપનની ચોકસાઈ વ્યવહારીક રીતે શૂન્ય થઈ જાય છે. તેથી, મોટાભાગના અન્ય સેન્સર માટે, વિશિષ્ટ માપન સર્કિટનો ઉપયોગ કરવામાં આવે છે, જે નોંધપાત્ર રીતે માપનની સંવેદનશીલતા અને ચોકસાઈમાં વધારો કરે છે.
સૌથી વધુ ઉપયોગમાં લેવાય છે બ્રિજ સર્કિટ સ્વિચિંગ, જેમાં એક અને કેટલીકવાર ઘણા સેન્સર ચતુષ્કોણમાં વધારાના રેઝિસ્ટર સાથે ચોક્કસ રીતે જોડાયેલા હોય છે (કહેવાતા વિન્સ્ટન બ્રિજ), જેમાં બે કર્ણ છે (ફિગ. 2). તેમાંથી એક, જેને a-b પાવર કર્ણ કહેવાય છે, તે ડીસી અથવા એસી સ્ત્રોતને કનેક્ટ કરવા માટે રચાયેલ છે, અને બીજું, સી-ડી માપન કર્ણ, એક માપન ઉપકરણનો સમાવેશ કરે છે.
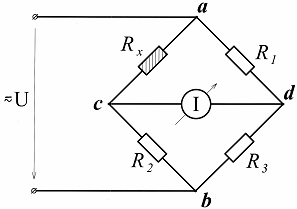
ચોખા. 2. કનેક્ટિંગ સેન્સર્સ માટે બ્રિજ સર્કિટ
જો ચતુર્ભુજ (બ્રિજ આર્મ્સ) ની વિરુદ્ધ બાજુઓના પ્રતિકાર મૂલ્યોના ઉત્પાદનો સમાન હોય તો Rx x R3 = R1NS R2 બિંદુ c અને d ની સંભવિતતાઓ સમાન હશે અને માપન કર્ણમાં કોઈ પ્રવાહ હશે નહીં. બ્રિજ સર્કિટની આ સ્થિતિને સામાન્ય રીતે કહેવામાં આવે છે પુલ સંતુલન, એટલે કે બ્રિજ સર્કિટ સંતુલિત છે.
જો બાહ્ય પ્રભાવને લીધે Rx સેન્સરનો પ્રતિકાર બદલાય છે, તો સંતુલન ખલેલ પહોંચશે અને આ પ્રતિકારમાં ફેરફારના પ્રમાણસર વર્તમાન માપન ઉપકરણમાંથી વહેશે. આ કિસ્સામાં, આ પ્રવાહની દિશા સૂચવે છે કે સેન્સરનો પ્રતિકાર કેવી રીતે બદલાયો છે (વધારો અથવા ઘટાડો).અહીં, માપન ઉપકરણની સંવેદનશીલતાની યોગ્ય પસંદગી સાથે, તે બધું વર્કિંગ સ્કેલ.
વિચારણા હેઠળ બ્રિજ સર્કિટ કહેવામાં આવે છે અસંતુલિત, કારણ કે માપન પ્રક્રિયા સમયે થાય છે અસંતુલન પુલ, એટલે કે અસંતુલન અસંતુલિત બ્રિજ સર્કિટનો ઉપયોગ મોટેભાગે એવા કિસ્સાઓમાં થાય છે કે જ્યાં બાહ્ય દળોના પ્રભાવ હેઠળ સેન્સરનો પ્રતિકાર એકમ સમય દીઠ ખૂબ જ ઝડપથી બદલાઈ શકે છે, પરંતુ પછી માપન ઉપકરણને બદલે રેકોર્ડિંગ ઉપકરણનો ઉપયોગ કરવો વધુ યોગ્ય છે જે આ રેકોર્ડ કરશે. ફેરફારો
તે વધુ સંવેદનશીલ માનવામાં આવે છે સંતુલિત બ્રિજ સર્કિટ, જેમાં એક વિશિષ્ટ માપન રિઓસ્ટેટ R (ફિગ. 3), સ્કેલથી સજ્જ છે અને તેને માપવાની તકનીકમાં રિઓકોર્ડ કહેવાય છે, વધુમાં બે નજીકના હાથ સાથે જોડાયેલ છે.
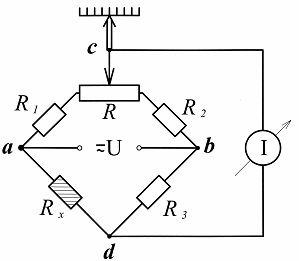
ચોખા. 3. સંતુલિત બ્રિજ સર્કિટ
આવા સર્કિટ સાથે કામ કરતી વખતે, સેન્સરના પ્રતિકારમાં દરેક ફેરફાર સાથે, બ્રિજ સર્કિટને સમાવિષ્ટ સ્લાઇડર સાથે ફરીથી સંતુલિત કરવું આવશ્યક છે, એટલે કે. જ્યારે માપન કર્ણમાં કોઈ વર્તમાન નથી. આ કિસ્સામાં, માપેલ પરિમાણનું મૂલ્ય (સેન્સરના પ્રતિકાર મૂલ્યમાં ફેરફાર) એક વિશિષ્ટ સ્કેલ દ્વારા નક્કી કરવામાં આવે છે જે આ રેકોર્ડથી સજ્જ છે અને સેન્સર દ્વારા માપવામાં આવેલા મૂલ્યના એકમોમાં માપાંકિત કરવામાં આવે છે.
સંતુલિત પુલની ઉચ્ચ સચોટતા એ હકીકત દ્વારા સમજાવવામાં આવી છે કે માપન ઉપકરણમાં તેના મૂલ્યને સીધું માપવા કરતાં વર્તમાનના અભાવને નિર્ધારિત કરવું સરળ છે, અને આવા કિસ્સાઓમાં પુલને સંતુલિત કરવું, એક નિયમ તરીકે, ઉપયોગ કરીને હાથ ધરવામાં આવે છે. બ્રિજ સર્કિટ અસંતુલિત સિગ્નલ દ્વારા નિયંત્રિત ખાસ ઇલેક્ટ્રિક મોટર.
સ્વિચિંગ સેન્સર્સ માટેના બ્રિજ સર્કિટ્સને સાર્વત્રિક માનવામાં આવે છે, કારણ કે તે સીધા અને વૈકલ્પિક પ્રવાહ બંને દ્વારા સંચાલિત થઈ શકે છે, અને સૌથી અગત્યનું, આ સર્કિટ સાથે એક જ સમયે ઘણા સેન્સર કનેક્ટ થઈ શકે છે, જે માત્ર સંવેદનશીલતા વધારવામાં જ ફાળો આપે છે, પણ માપન ચોકસાઈ.
વિભેદક સર્કિટ સેન્સર્સનો સમાવેશ વૈકલ્પિક વર્તમાન નેટવર્ક દ્વારા સંચાલિત વિશિષ્ટ ટ્રાન્સફોર્મરનો ઉપયોગ કરીને બનાવવામાં આવ્યો છે, જેનું ગૌણ વિન્ડિંગ બે સમાન ભાગોમાં વહેંચાયેલું છે. આમ, આ સર્કિટમાં (ફિગ. 4) બે સંલગ્ન સર્કિટ રચાય છે, જેમાંથી દરેકનું પોતાનું વર્તમાન લૂપ I1 અને I2 છે. અને માપન ઉપકરણમાં વર્તમાનનું મૂલ્ય આ પ્રવાહોના તફાવત દ્વારા નક્કી કરવામાં આવે છે, અને જો સેન્સર Rx અને વધારાના રેઝિસ્ટર Rd ના પ્રતિકાર સમાન હોય, તો માપન ઉપકરણમાં કોઈ વર્તમાન હશે નહીં.
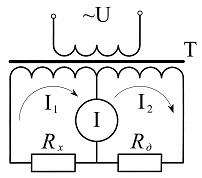
ચોખા. 4. વિભેદક સેન્સર સ્વિચિંગ સર્કિટ
જ્યારે સેન્સરનો પ્રતિકાર બદલાય છે, ત્યારે આ ફેરફાર માટે પ્રમાણસર એક વર્તમાન માપન ઉપકરણમાંથી વહેશે, અને આ પ્રવાહનો તબક્કો આ પ્રતિકાર (વધારો અથવા ઘટાડો) માં ફેરફારની પ્રકૃતિ પર આધારિત રહેશે. વિભેદક સર્કિટને પાવર કરવા માટે માત્ર વૈકલ્પિક પ્રવાહનો ઉપયોગ કરવામાં આવે છે, અને તેથી સેન્સર તરીકે પ્રતિક્રિયાશીલ સેન્સર્સ (ઇન્ડક્ટિવ અથવા કેપેસિટીવ) નો ઉપયોગ કરવો વધુ યોગ્ય છે.
વિભેદક ઇન્ડક્ટિવ અથવા કેપેસિટીવ સેન્સર સાથે કામ કરતી વખતે આવા સ્વિચિંગ સર્કિટનો ઉપયોગ કરવો ખાસ કરીને અનુકૂળ છે. આવા સેન્સર્સનો ઉપયોગ કરતી વખતે, માત્ર ચળવળની તીવ્રતા જ નહીં, ઉદાહરણ તરીકે, ફેરોમેગ્નેટિક કોર (ફિગ. 5), પણ આ ચળવળની દિશા (તેનું ચિહ્ન) પણ રેકોર્ડ કરવામાં આવે છે, જેના પરિણામે વૈકલ્પિક તબક્કો માપવાના ઉપકરણમાંથી પસાર થતો પ્રવાહ, ફેરફારો.આ માપની સંવેદનશીલતા વધારે છે.
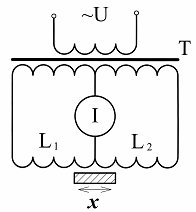
ચોખા. 5. પ્રેરક વિભેદક સેન્સરનું કનેક્શન ડાયાગ્રામ
એ નોંધવું જોઇએ કે માપનની ચોકસાઈ વધારવા માટે, કેટલાક કિસ્સાઓમાં અન્ય પ્રકારના સમાન માપન સર્કિટનો ઉપયોગ કરવામાં આવે છે, ઉદાહરણ તરીકે, સંતુલિત વિભેદક સર્કિટ… આવા સર્કિટ્સમાં કાં તો પુનરાવર્તિત તાર અથવા વિશિષ્ટ સ્કેલ સાથે વિશિષ્ટ માપન ઓટોટ્રાન્સફોર્મરનો સમાવેશ થાય છે, અને આવા સર્કિટ સાથેની માપન પ્રક્રિયા સંતુલિત બ્રિજ સર્કિટ સાથેના માપન જેવી જ હોય છે.
વળતર યોજના સેન્સરનો સમાવેશ ઉપર ચર્ચા કરેલ તમામમાં સૌથી સચોટ માનવામાં આવે છે. તેની કામગીરી આઉટપુટ વોલ્ટેજ વળતર અથવા EMF પર આધારિત છે. માપવાના રિઓસ્ટેટ (રિઓકોર્ડ) માં વોલ્ટેજ ડ્રોપના સંદર્ભમાં તેના સમાન સેન્સર. વળતર સર્કિટને પાવર કરવા માટે માત્ર ડીસી સ્ત્રોતનો ઉપયોગ કરવામાં આવે છે અને તે મુખ્યત્વે ડીસી જનરેટર સેન્સર્સ સાથે વપરાય છે.
ચાલો સેન્સર (ફિગ. 6) તરીકે થર્મોકોપલનો ઉપયોગ કરવાના ઉદાહરણનો ઉપયોગ કરીને આ સર્કિટની કામગીરી જોઈએ.
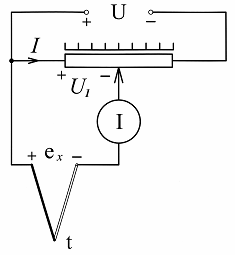
ચોખા. 6. થર્મોઇલેક્ટ્રિક સેન્સર પર સ્વિચ કરવા માટે વળતર સર્કિટ
લાગુ કરેલ વોલ્ટેજ U ની ક્રિયા હેઠળ, માપન રિઓસ્ટેટમાંથી પ્રવાહ વહે છે, જે તેના ડાબા આઉટપુટથી મોટર સુધી રિઓસ્ટેટના વિભાગમાં વોલ્ટેજ U1 માં ડ્રોપનું કારણ બને છે. આ વોલ્ટેજ અને EMF થર્મોકોલ્સની સમાનતાના કિસ્સામાં - ગ્લુકોમીટર દ્વારા કોઈ પ્રવાહ હશે નહીં.
જો ઇએમએફ સેન્સરનું મૂલ્ય બદલાય છે, તો સ્લાઇડરના સ્લાઇડરનો ઉપયોગ કરીને ફરીથી આ વર્તમાનની ગેરહાજરી પ્રાપ્ત કરવી જરૂરી છે. અહીં, સંતુલન પુલ સર્કિટની જેમ, માપેલા પરિમાણનું મૂલ્ય, અમારા કિસ્સામાં તાપમાન (emf થર્મોકોલ) સ્લાઇડિંગ વાયરના સ્કેલ દ્વારા નક્કી કરવામાં આવે છે, અને તેની મોટરની હિલચાલ હાથ ધરવામાં આવે છે, મોટેભાગે, ખાસ ઇલેક્ટ્રિક મોટરની મદદથી પણ.
વળતર સર્કિટની ઉચ્ચ ચોકસાઈ એ હકીકતને કારણે છે કે માપન દરમિયાન, સેન્સર દ્વારા ઉત્પન્ન થતી વિદ્યુત ઊર્જાનો વપરાશ થતો નથી, કારણ કે તેના સમાવેશના સર્કિટમાં વર્તમાન શૂન્ય છે. આ સર્કિટનો ઉપયોગ પેરામેટ્રિક સેન્સર સાથે પણ થઈ શકે છે, પરંતુ પછી વધારાના ડીસી સ્ત્રોતની જરૂર છે, જેનો ઉપયોગ પેરામેટ્રિક સેન્સરના પાવર સપ્લાય સર્કિટમાં થાય છે.