ઇલેક્ટ્રોમેગ્નેટિક રિલેના મૂળભૂત પરિમાણો અને લાક્ષણિકતાઓ
 વિદ્યુત ઉપકરણ કે જે રિલે નિયંત્રણ કાયદો લાગુ કરે છે તેને રિલે કહેવામાં આવે છે... રિલેમાં, જ્યારે નિયંત્રણ (ઇનપુટ) પરિમાણ ચોક્કસ સેટ મૂલ્યમાં સરળતાથી બદલાય છે, ત્યારે નિયંત્રિત (આઉટપુટ) પરિમાણ અચાનક બદલાય છે. ઉપરાંત, આમાંના ઓછામાં ઓછા એક પરિમાણો ઇલેક્ટ્રિકલ હોવા જોઈએ.
વિદ્યુત ઉપકરણ કે જે રિલે નિયંત્રણ કાયદો લાગુ કરે છે તેને રિલે કહેવામાં આવે છે... રિલેમાં, જ્યારે નિયંત્રણ (ઇનપુટ) પરિમાણ ચોક્કસ સેટ મૂલ્યમાં સરળતાથી બદલાય છે, ત્યારે નિયંત્રિત (આઉટપુટ) પરિમાણ અચાનક બદલાય છે. ઉપરાંત, આમાંના ઓછામાં ઓછા એક પરિમાણો ઇલેક્ટ્રિકલ હોવા જોઈએ.
કાર્યાત્મક અંગોની ક્રિયા ઇલેક્ટ્રોમેગ્નેટિક રિલે અંજીરમાં દર્શાવેલ આકૃતિ અનુસાર શોધી શકાય છે. 1. પ્રાપ્ત કરનાર શરીર A ચુંબકીય સર્કિટ 1 ના કોઇલ 2 ને પૂરા પાડવામાં આવેલ ઇનપુટ મૂલ્ય (વોલ્ટેજ) Uin ને મધ્યવર્તી મૂલ્યમાં રૂપાંતરિત કરે છે, એટલે કે. એન્કરના યાંત્રિક બળમાં 3. એન્કર FЯ નું યાંત્રિક બળ એક્ઝિક્યુટિવ બોડી B ની સંપર્ક સિસ્ટમ પર કાર્ય કરે છે. મધ્યવર્તી મૂલ્ય — એન્કર FЯ નું બળ, ઇનપુટ મૂલ્ય Uin ના પ્રમાણસર છે, તેની સરખામણી મધ્યવર્તી શરીર B ના વસંત 9 દ્વારા વિકસિત બળ Fpr નું આપેલ મૂલ્ય. જ્યારે Uin <Uav, Fya
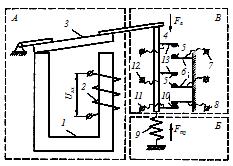 ચોખા. ઇલેક્ટ્રોમેગ્નેટિક રિલેની 1 યોજના
ચોખા. ઇલેક્ટ્રોમેગ્નેટિક રિલેની 1 યોજના
ઓપરેશનની પ્રક્રિયામાં, ટાઇમ સ્કેલ પર ઇલેક્ટ્રોમેગ્નેટિક રિલે ચાર તબક્કાઓને અલગ પાડે છે: એક્ટ્યુએશન ટેવનો સમયગાળો (સમય), બેવર્ક કામનો સમયગાળો, શટડાઉન ટૉફનો સમયગાળો (સમય), આરામનો સમયગાળો (ફિગ) 2).
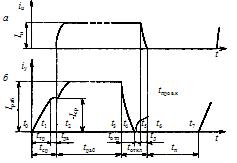
ચોખા. 2. સમયસર આઉટપુટ (a) અને આઉટપુટ (b) ના જથ્થા પર નિર્ભરતા
ઇલેક્ટ્રોમેગ્નેટિક રિલેનો એક્યુએશન સમયગાળો
 પ્રતિભાવ અવધિમાં ઇનપુટ સિગ્નલ મોનિટરિંગ બોડીને અસર કરવાનું શરૂ કરે ત્યારથી નિયંત્રિત સર્કિટમાં સિગ્નલ દેખાય ત્યાં સુધી સમય અંતરાલનો સમાવેશ થાય છે. એબ્સીસા અક્ષ tav = t2 –t0 નો સેગમેન્ટ અંજીરમાં આ સમયગાળાને અનુરૂપ છે. 2, બી. આ ક્ષણે t0 રિલે કોઇલમાં વર્તમાન એ મૂલ્ય સુધી વધે છે કે જેના પર આર્મેચર પર કામ કરતું ઇલેક્ટ્રોમેગ્નેટિક બળ Fe મધ્યવર્તી શરીરના સ્પ્રિંગ ફોર્સ Fm (મિકેનિકલ ફોર્સ) નો વિરોધ કરવાનું શરૂ કરે છે. ઇનપુટ મૂલ્યને પછી સ્વીકૃતિ મૂલ્ય કહેવામાં આવે છે.
પ્રતિભાવ અવધિમાં ઇનપુટ સિગ્નલ મોનિટરિંગ બોડીને અસર કરવાનું શરૂ કરે ત્યારથી નિયંત્રિત સર્કિટમાં સિગ્નલ દેખાય ત્યાં સુધી સમય અંતરાલનો સમાવેશ થાય છે. એબ્સીસા અક્ષ tav = t2 –t0 નો સેગમેન્ટ અંજીરમાં આ સમયગાળાને અનુરૂપ છે. 2, બી. આ ક્ષણે t0 રિલે કોઇલમાં વર્તમાન એ મૂલ્ય સુધી વધે છે કે જેના પર આર્મેચર પર કામ કરતું ઇલેક્ટ્રોમેગ્નેટિક બળ Fe મધ્યવર્તી શરીરના સ્પ્રિંગ ફોર્સ Fm (મિકેનિકલ ફોર્સ) નો વિરોધ કરવાનું શરૂ કરે છે. ઇનપુટ મૂલ્યને પછી સ્વીકૃતિ મૂલ્ય કહેવામાં આવે છે.
પ્રારંભિક સમયગાળો સેગમેન્ટ ttr = t1 — t0 ને અનુરૂપ છે. T1 સમયે, રિલે ઇલેક્ટ્રોમેગ્નેટનું આર્મેચર ખસેડવાનું શરૂ કરે છે. tdv = t2 — t1 દરમિયાન, એન્કર ફરે છે, મધ્યવર્તી શરીર B ના પ્રતિકારને દૂર કરે છે (ફિગ. 1 જુઓ) અને એક્ઝિક્યુટિવ બોડી C ને સક્રિય કરે છે.
આર્મેચર સ્ટ્રોકના અંતે, ડ્રાઇવ સંપર્કો બંધ થાય છે, (ફિગ. 2, એ) માં લોડ પ્રવાહ શૂન્યથી સંતુલન મૂલ્ય સુધી વધવાનું શરૂ કરે છે. ઇનપુટ મૂલ્ય કે જેનાથી આઉટપુટ સર્કિટનું નિયંત્રણ શરૂ થાય છે તેને સ્વીકૃતિ મૂલ્ય (Iav) કહેવામાં આવે છે. Isr ને અનુરૂપ શક્તિ Psr ને કાર્યકારી શક્તિ કહેવામાં આવે છે.
પ્રતિભાવ સમય t cf = ttr + tdv.
ઇલેક્ટ્રોમેગ્નેટિક રિલેનો પ્રતિભાવ સમય 1-2 થી 20 ms સુધી બદલાય છે. ઇલેક્ટ્રોમેગ્નેટિક ટાઇમ રિલે 10 સેકન્ડ સુધીનો વિલંબ પૂરો પાડે છે.
રિલેના પ્રતિભાવ સમયનો અંદાજ કાઢવા માટે, અભિવ્યક્તિનો ઉપયોગ કરવાની મંજૂરી છે
t cf = t1kz-bm –a,
જ્યાં t1 એ આપેલ સલામતી પરિબળ ks અને પરિબળ m = 1 માટે પ્રતિભાવ સમય છે; a, b — ગુણાંક કે જે રિલેના પ્રકાર અને kz અને m ના મૂલ્યોને આધારે નક્કી કરવામાં આવે છે.
kz = 1.5¸2 પર હાઇ-સ્પીડ રિલે માટે, ગુણાંક a નું મૂલ્ય એકતા સુધી પહોંચે છે. k z = 1.5¸3 સાથેના સામાન્ય રિલે માટે, મૂલ્ય a = 0.25¸0.95, ગુણાંક b નું મૂલ્ય સામાન્ય રીતે 1.4-1.6 શ્રેણીમાં હોય છે.
ઇલેક્ટ્રોમેગ્નેટિક રિલેનો ઓપરેટિંગ સમયગાળો
 કામકાજના સમયગાળામાં સમય અંતરાલ twork = t3 — t2 નો સમાવેશ થાય છે, એટલે કે. આઉટપુટ સર્કિટ ટી 2 ના નિયંત્રણની ક્ષણથી ઇનપુટ સિગ્નલ ટી 3 ના સંવેદનશીલ અંગ પર અસરની સમાપ્તિની ક્ષણ સુધીનો સમય. વર્તમાન Iwork (ફિગ. 2, b) ના સ્થિર મૂલ્ય સુધી વધવાનું શરૂ કરે છે — આ ઇનપુટ મૂલ્યનું કાર્યકારી મૂલ્ય છે, જે રિલેની વિશ્વસનીય કામગીરીને સુનિશ્ચિત કરે છે.
કામકાજના સમયગાળામાં સમય અંતરાલ twork = t3 — t2 નો સમાવેશ થાય છે, એટલે કે. આઉટપુટ સર્કિટ ટી 2 ના નિયંત્રણની ક્ષણથી ઇનપુટ સિગ્નલ ટી 3 ના સંવેદનશીલ અંગ પર અસરની સમાપ્તિની ક્ષણ સુધીનો સમય. વર્તમાન Iwork (ફિગ. 2, b) ના સ્થિર મૂલ્ય સુધી વધવાનું શરૂ કરે છે — આ ઇનપુટ મૂલ્યનું કાર્યકારી મૂલ્ય છે, જે રિલેની વિશ્વસનીય કામગીરીને સુનિશ્ચિત કરે છે.
Iwork / Icr = kz ગુણોત્તરને કામ પર સલામતીનું પરિબળ કહેવામાં આવે છે.
રિલેના સંવેદનશીલ તત્વની ઓવરલોડ ક્ષમતાને દર્શાવવા માટે, ઇનપુટ જથ્થાના મૂલ્યનો ઉપયોગ કરવામાં આવે છે, જેને ઓપરેટિંગ જથ્થાની મર્યાદા મૂલ્ય કહેવામાં આવે છે Ioperating.max.
કાર્યકારી મૂલ્યની મર્યાદા - આ તેનું મૂલ્ય છે જે સંવેદનશીલ અંગ ટૂંકા સામાન્ય સમયગાળા માટે ટકી શકે છે. જો કે, જ્યારે વિદ્યુત અથવા યાંત્રિક શક્તિ અથવા ગરમીની સ્થિતિને કારણે રિલે સામાન્ય મોડમાં કાર્યરત હોય ત્યારે આ મૂલ્યનું મૂલ્ય અસ્વીકાર્ય છે.
કંટ્રોલ પાવર કન્સેપ્ટ Ru નો ઉપયોગ રિલે ડ્રાઇવની લોડ વહન ક્ષમતાને દર્શાવવા માટે થાય છે. નિયંત્રણ શક્તિ એ નિયંત્રિત સર્કિટમાંની શક્તિ છે જે ડ્રાઇવ લાંબા સમય સુધી પ્રસારિત કરી શકે છે.
ઇલેક્ટ્રોમેગ્નેટિક રિલે સફરનો સમયગાળો
 બંધ અવધિમાં સમય અંતરાલ toff = t6 — t3 હોય છે, એટલે કે. અનુભૂતિ અંગ t3 પર અસર બંધ થવાની ક્ષણથી ક્ષણ સુધી જ્યારે નિયંત્રિત સર્કિટમાં વર્તમાન શૂન્ય થઈ જાય છે (ફિગ. 16, a).
બંધ અવધિમાં સમય અંતરાલ toff = t6 — t3 હોય છે, એટલે કે. અનુભૂતિ અંગ t3 પર અસર બંધ થવાની ક્ષણથી ક્ષણ સુધી જ્યારે નિયંત્રિત સર્કિટમાં વર્તમાન શૂન્ય થઈ જાય છે (ફિગ. 16, a).
બંધ અવધિમાં પ્રકાશન અવધિનો સમાવેશ થાય છે totp = t4 — t3 જેમાં રિલે બંધ છે. રિલે કોઇલમાં વર્તમાન iy ઘટીને શૂન્ય થઈ જાય છે (ફિગ. 2, b). આ સમયગાળા દરમિયાન, વિરોધી વસંત બળ (યાંત્રિક બળ) ઇલેક્ટ્રોમેગ્નેટિક બળ કરતાં વધી જાય છે, એટલે કે. Fm> Fe અને આર્મેચર રીલીઝ થાય છે.
સંપર્ક નિષ્ફળતા (અંતરાલ tc = t5 — t4) પસંદ કર્યા પછી, રિલે સંપર્કો ખુલે છે અને તેમની વચ્ચે એક ચાપ પ્રજ્વલિત થાય છે, જે સમય પછી ઓલવાઈ જાય છે td = t6 — t5. td સમયગાળા દરમિયાન, નિયંત્રિત સર્કિટમાં વર્તમાન In થી શૂન્ય સુધી ઘટે છે (ફિગ. 2, a).
બંધ સમય t t = tp + tc + td.
ટ્રિપિંગ સમયગાળો પુનઃપ્રાપ્તિ પરિબળ દ્વારા વર્ગીકૃત થયેલ છે, જે પીકઅપ વર્તમાન Iav અને ડ્રોપ કરંટ Iotp નો ગુણોત્તર છે: kv = Iotp / Icr.
સામાન્ય રીતે, પાવર સિસ્ટમ પ્રોટેક્શન રિલે અને કંટ્રોલ રિલે માટે જે ઇનપુટ પેરામીટરને સાંકડી મર્યાદામાં નિયંત્રિત કરે છે, kv એકતાની નજીક હોવું જોઈએ.
ઇલેક્ટ્રોમેગ્નેટિક રિલેનો બાકીનો સમયગાળો
બાકીનો સમયગાળો સમય અંતરાલ tp = t7 — t6 છે.
વિલંબનો સમયગાળો નિષ્ક્રિય મૂલ્ય તરીકે ઓળખાતા પરિમાણ દ્વારા વર્ગીકૃત થયેલ છે, જે ઇનપુટ જથ્થાનું સૌથી મોટું મૂલ્ય છે જે સુનિશ્ચિત કરે છે કે રિલે ઓપરેટ થતું નથી અથવા રાખવામાં આવે છે. શટડાઉનનો સમય ઓપરેટિંગ સ્ટાર્ટ-અપ સમય અને પ્રકાશન સમય કરતાં ઓછો છે.
નિયંત્રણ શક્તિ અને એક્યુએશન પાવરના ગુણોત્તરને ગેઇન કહેવામાં આવે છે, ku = Py/Pcr.
એકમ સમય દીઠ શરુઆતની સંખ્યા એ મૂલ્ય દ્વારા નક્કી કરવામાં આવે છે જે ચક્ર સમયના વિપરિત પ્રમાણસર હોય છે:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
લકોટા ઓ.બી.