એન્કોડર્સ - રોટરી એંગલ સેન્સર્સ
 વિવિધ પ્રકારનાં ઔદ્યોગિક સાધનોમાં પોઝિશનિંગ સરળ દેખાતા ઉપકરણો - એન્કોડર્સ (અથવા બીજા શબ્દોમાં કહીએ તો, એંગલ સેન્સર) નો ઉપયોગ કરીને પ્રદાન કરવામાં આવે છે.
વિવિધ પ્રકારનાં ઔદ્યોગિક સાધનોમાં પોઝિશનિંગ સરળ દેખાતા ઉપકરણો - એન્કોડર્સ (અથવા બીજા શબ્દોમાં કહીએ તો, એંગલ સેન્સર) નો ઉપયોગ કરીને પ્રદાન કરવામાં આવે છે.
એન્કોડરનો ઉપયોગ રેખીય અથવા રોટરી ગતિને બાઈનરી ડિજિટલ સિગ્નલમાં રૂપાંતરિત કરવા માટે થાય છે. એન્કોડર એ એક ઉપકરણ છે જેનો શાફ્ટ અભ્યાસ હેઠળના ઑબ્જેક્ટના ફરતા શાફ્ટ સાથે જોડાયેલ છે અને બાદમાંના પરિભ્રમણના કોણનું ઇલેક્ટ્રોનિક નિયંત્રણ પૂરું પાડે છે. ઓપરેશનના સિદ્ધાંત અનુસાર, એન્કોડર્સને ઓપ્ટિકલ અને મેગ્નેટિકમાં વિભાજિત કરવામાં આવે છે.
ઓપ્ટિકલ એન્કોડરના શાફ્ટ પર પરિમિતિની આસપાસ તૂટક તૂટક વિન્ડો સાથે એક ડિસ્ક છે, જેની સામે એલઇડી અને ફોટોટ્રાન્સિસ્ટર છે, જે ફોર્મમાં આઉટપુટ સિગ્નલની રચનાને સુનિશ્ચિત કરે છે. લંબચોરસ પલ્સ ટ્રેનો વિન્ડોની સંખ્યા અને ડિસ્ક/શાફ્ટની રોટેશનલ સ્પીડ બંનેના પ્રમાણમાં આવર્તન સાથે. કઠોળની સંખ્યા પરિભ્રમણનો કોણ સૂચવે છે.
ઓપ્ટિકલ એન્કોડર્સ વધારાના અને સંપૂર્ણ એન્કોડર્સ તરીકે ઉપલબ્ધ છે.
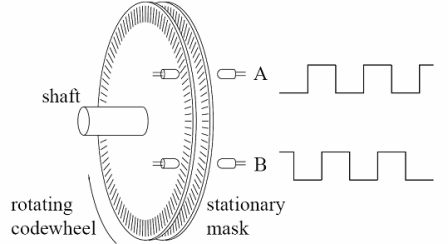
ઇન્ક્રીમેન્ટલ એન્કોડર પાસે બેઝ ત્રિજ્યા અને બે રીડિંગ જેવા જ કદની ઘણી બધી વિન્ડો સાથે તૂટક તૂટક ડિસ્ક હોય છે. optocouplers, જે તમને પરિભ્રમણના કોણ અને શાફ્ટના પરિભ્રમણની દિશા બંનેને ઠીક કરવાની મંજૂરી આપે છે.ડિસ્કની વધારાની ત્રિજ્યા પર સિંગલ બ્રેક વિન્ડો અને અનુરૂપ ઓપ્ટોકપ્લર છે જે પ્રારંભિક સ્થિતિ (હોમ) ને વ્યાખ્યાયિત કરે છે.
નેગેટિવ ટોર્ક - ઇન્ક્રીમેન્ટલ એન્કોડર્સ પરિભ્રમણના કોણનું સંબંધિત વાંચન પ્રદાન કરે છે, જ્યારે પરિભ્રમણ બંધ કરવામાં આવે ત્યારે તે વિશેની માહિતી સાચવવામાં આવતી નથી. તેમના ફાયદાઓમાં ઉચ્ચ રીઝોલ્યુશન અને ઉચ્ચ ઓપરેટિંગ આવર્તન પર ડિઝાઇનની સરળતા (અને, તે મુજબ, ઓછી કિંમત) શામેલ છે.
વધેલા ટકાઉપણું સાથે ઇન્ક્રીમેન્ટલ એન્કોડર્સ ઔદ્યોગિક એપ્લિકેશન્સ પર કેન્દ્રિત છે - મિકેનિકલ એન્જિનિયરિંગ, રોલિંગ મિલ્સ, શિપબિલ્ડિંગ, ટેક્સટાઇલ, ફૂટવેર, વુડવર્કિંગમાં. આવા એન્કોડર્સ માટે, નિર્ણાયક પરિમાણો પરિભ્રમણના ખૂણામાં રિઝોલ્યુશન, ઉચ્ચ ફ્રીક્વન્સીઝ પર કામ કરવાની ક્ષમતા, કઠોર વાતાવરણની પરિસ્થિતિઓનો સામનો કરવા માટે ઉચ્ચ ડિગ્રી રક્ષણ છે.
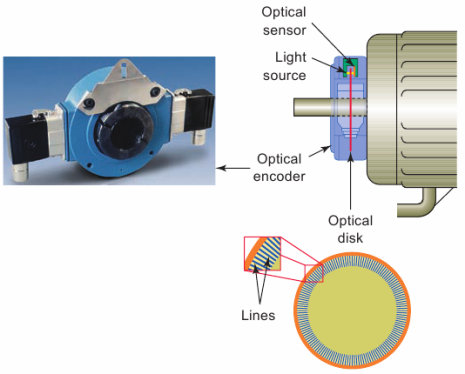
રેખાઓ અથવા ખાંચો સાથેની ડિસ્ક જે પ્રકાશના બીમને ઓપ્ટિકલ સેન્સરમાં અવરોધે છે. ઇલેક્ટ્રોનિક સર્કિટ બીમ તૂટે છે અને એન્કોડરમાંથી ડિજિટલ આઉટપુટ પલ્સ જનરેટ કરે છે.
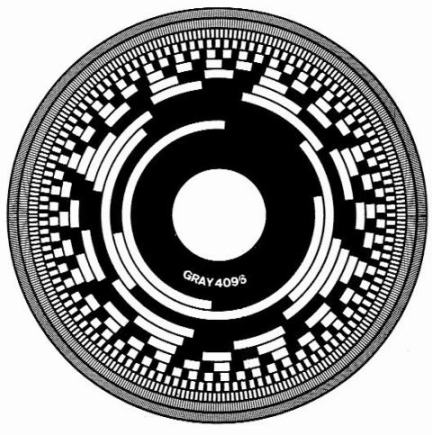
એન્કોડિંગ ડિસ્ક — શાફ્ટના કોણીય વિસ્થાપનને ડિજિટલ સ્વરૂપમાં રૂપાંતરિત કરવા માટેનું ઉપકરણ. એન્કોડિંગ ડિસ્ક પર ડિજિટલ કોડની ભૌમિતિક છબી લાગુ કરવામાં આવે છે. કોડ બીટ પ્રતીકો એક કેન્દ્રિત ટ્રેક પર લાગુ કરવામાં આવે છે, અને ઓછામાં ઓછા નોંધપાત્ર (ઓછા નોંધપાત્ર) બિટ્સ પરિઘની નજીક સ્થિત છે.
કોડ વાંચવાની પદ્ધતિ (સંપર્ક, ફોટોઇલેક્ટ્રિક, ઇલેક્ટ્રોમેગ્નેટિક, ઇન્ડક્શન, ઇલેક્ટ્રોસ્ટેટિક, વગેરે) પર આધાર રાખીને, કોડની ભૌમિતિક છબી ઇલેક્ટ્રિકલી વાહક અને ઇલેક્ટ્રિકલી ઇન્સ્યુલેટેડ, પારદર્શક અને અપારદર્શક, ચુંબકીય અને બિન-ચુંબકીય, વગેરેનો સમાવેશ કરે છે.
સૌથી વધુ વ્યાપક દ્વિસંગી કોડની જાતો સાથે એન્કોડિંગ ડિસ્ક હતી, જે અલગ અલગ વિભાગોની સીમાઓને પાર કરતી વખતે ભૂલોની ઘટનાને બાકાત રાખે છે, જ્યારે કેટલાક બીટ્સ સીમાની એક બાજુએ વાંચી શકાય છે, અને કેટલાક બીજી બાજુ (અચોક્કસ ઇન્સ્ટોલેશનને કારણે) દૂર કરી શકાય તેવા ઉપકરણોના અથવા ડિસ્ક ફરતી વખતે બિન-સાથે વાંચી શકાય તેવા કોડને કારણે આ કોડ્સમાં કહેવાતા ફાઉ કોડ (બાર્કર કોડ) અને રીફ્લેક્સ કોડ (ગ્રે કોડ)નો સમાવેશ થાય છે.
કેટલાક ઓપ્ટિકલ રોટરી એન્કોડર પ્રતિબિંબીત એન્કોડર ડિસ્કનો ઉપયોગ કરે છે. આ ડિસ્કમાં વૈકલ્પિક વિભાગો છે જે પ્રકાશને શોષી લે છે અથવા પ્રતિબિંબિત કરે છે, અને રીસીવર સાથે પ્રકાશ સ્ત્રોત ડિસ્કની એક બાજુ પર સ્થિત છે. જો ત્યાં માત્ર એક જ પ્રકાશ સ્ત્રોત અને રીસીવર હોય, તો સેન્સરમાંથી સ્પંદનોનો ક્રમ તમને તે શોધવાની મંજૂરી આપે છે કે ડિસ્ક તેની પાછલી સ્થિતિની તુલનામાં કેટલા પગલાઓ ફેરવે છે.
સેન્સર પરિભ્રમણની દિશા કહી શકતું નથી, પરંતુ જો તમે પ્રથમમાંથી 90 તબક્કામાંથી બીજા સ્ત્રોત-થી-રિસીવર જોડીને ઉમેરશો, તો માઇક્રોકન્ટ્રોલર વચ્ચેના તબક્કાના તફાવત દ્વારા ડિસ્કના પરિભ્રમણની દિશા નક્કી કરવામાં સક્ષમ હશે. પલ્સ ટ્રેન.
તે યાદ રાખવું જોઈએ કે કોઈપણ સિસ્ટમ કે જે ડિસ્કના સંબંધિત પરિભ્રમણને શોધી કાઢે છે પરંતુ તેની સંપૂર્ણ કોણીય સ્થિતિને માપી શકતી નથી તે વધારો એન્કોડર છે.
નિરપેક્ષ એન્કોડરમાં અલગ-અલગ ત્રિજ્યાની સંકેન્દ્રિત વિન્ડો સાથે અખંડિત ડિસ્ક હોય છે જેના સંબંધિત કદ દ્વિસંગી કોડ દ્વારા નક્કી કરવામાં આવે છે અને જે એકસાથે વાંચવામાં આવે છે, જે દરેક કોણીય સ્થિતિ (ગ્રે કોડ, બાઈનરી કોડ...) માટે કોડેડ આઉટપુટ સિગ્નલ આપે છે.
આ કિસ્સામાં, ડિજિટલ કાઉન્ટર વિના શાફ્ટની ત્વરિત સ્થિતિ પર ડેટા મેળવવો અથવા પ્રારંભિક સ્થિતિ પર પાછા આવવું શક્ય છે, કારણ કે આઉટપુટમાં કોડેડ શબ્દ છે — «n બીટ», ઇલેક્ટ્રિકલ અવાજથી સુરક્ષિત.
એબ્સોલ્યુટ એન્કોડરનો ઉપયોગ એપ્લીકેશનમાં થાય છે જેને લાંબા સમય સુધી ઇનપુટ ડેટાના સંગ્રહની જરૂર હોય છે, પરંતુ તે ડિઝાઇનમાં વધુ જટિલ અને વધુ ખર્ચાળ હોય છે.
ફીલ્ડબસ ઈન્ટરફેસ સાથેના સંપૂર્ણ એન્કોડર્સમાં CANopen, ProfiBus, DeviceNet, Ethernet, InterBus ધોરણો અનુસાર ફીલ્ડબસ સંચાર માટે આઉટપુટ ઈન્ટરફેસ હોય છે અને પરિભ્રમણનો કોણ નક્કી કરવા માટે બાઈનરી કોડનો ઉપયોગ કરે છે. ઉપરોક્ત સંચાર ઈન્ટરફેસ સંખ્યાબંધ પરિમાણો અનુસાર પ્રોગ્રામેબલ છે: દા.ત. પરિભ્રમણની દિશા, ક્રાંતિ દીઠ પલ્સ રિઝોલ્યુશન, બૉડ રેટ.

મોટર શાફ્ટ પર માઉન્ટ થયેલ એન્કોડર્સ અસરકારક રીતે ચોક્કસ સ્થિતિ નિયંત્રણ પ્રદાન કરે છે. આવા એન્કોડર્સ સામાન્ય રીતે "છિદ્ર" સંસ્કરણમાં બનાવવામાં આવે છે અને ખાસ કપ્લિંગ્સ તેમની ડિઝાઇનના મહત્વપૂર્ણ ઘટકો છે, જે મોટર શાફ્ટના બેકલેશને વળતર આપવા માટે પરવાનગી આપે છે.
ઉપરોક્ત પરિસ્થિતિઓ હેઠળ સ્થિતિ સૌથી વધુ અસરકારક રીતે ચુંબકીય એન્કોડર પ્રદાન કરે છે, જેમાં શાફ્ટના કોણીય વિસ્થાપનનું ઇલેક્ટ્રોનિક સિગ્નલમાં રૂપાંતર હોલ અસરના આધારે બિન-સંપર્ક રીતે હાથ ધરવામાં આવે છે, તે અંદરના ઓપ્ટિકલ ચોપરના પરિભ્રમણ સાથે સંબંધિત નથી. સેન્સર અને 60,000 rpm સુધીની ઝડપ સાથે સિગ્નલ પ્રોસેસિંગની મંજૂરી આપે છે.
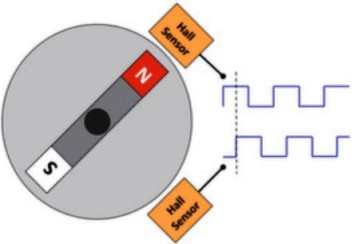
ચુંબકીય એન્કોડરમાં, બાહ્ય શાફ્ટનું હાઇ-સ્પીડ પરિભ્રમણ, જેના પર કાયમી નળાકાર ચુંબક નિશ્ચિત હોય છે, તે સિગ્નલ પ્રોસેસિંગ કંટ્રોલર સાથે એક સેમિકન્ડક્ટર ક્રિસ્ટલ પર સંયુક્ત હોલ સેન્સર દ્વારા અનુભવાય છે.
જ્યારે સ્થાયી ચુંબકના ધ્રુવો સાથે માઇક્રોસર્ક્યુટ પર ફરે છે હોલ સેન્સર ચલ ચુંબકીય ઇન્ડક્શન વેક્ટર હોલ વોલ્ટેજને પ્રેરિત કરે છે, જેમાં શાફ્ટ રોટેશન એન્ગલના તાત્કાલિક મૂલ્ય વિશેની માહિતી હોય છે. માઇક્રોકન્ટ્રોલર હોલ વોલ્ટેજનું પોઝિશનિંગ એંગલ પેરામીટરમાં ઝડપી રૂપાંતરણ પૂરું પાડે છે.

ચુંબક અને હોલ સેન્સર તત્વોના સીધા યાંત્રિક જોડાણ વિના આવા રૂપાંતરણની શક્યતા એ ચુંબકીય એન્કોડરનો મુખ્ય ફાયદો છે, તેમને ઉચ્ચ વિશ્વસનીયતા અને ટકાઉપણું પ્રદાન કરે છે અને ઔદ્યોગિક ઓટોમેશન, પ્રિન્ટીંગ, મેટલવર્કિંગ સંબંધિત હાઇ-સ્પીડ એપ્લિકેશન્સમાં કાર્યક્ષમ રીતે કાર્ય કરવાની મંજૂરી આપે છે. , માપન અને માપન સાધનો.