મેટલ કટીંગ મશીનોની સહાયક ડ્રાઈવો માટે ઇલેક્ટ્રિક મોટર્સની પસંદગી
 મશીન ટૂલ્સ પર સહાયક ડ્રાઈવો (કેલિપર્સ, હેડ પેડ્સ, ક્રોસ આર્મ્સ વગેરે માટે ઝડપી ડ્રાઈવો) સામાન્ય રીતે ટૂંકા સમયના લોડ મોડમાં કાર્ય કરે છે. આવા સમયગાળાની ઇલેક્ટ્રિક ડ્રાઇવના સંચાલનની પદ્ધતિ, જેમાં ઇલેક્ટ્રિક ડ્રાઇવમાં સમાવિષ્ટ તમામ ઉપકરણોનું તાપમાન ઓપરેશન દરમિયાન સ્થિર મૂલ્ય સુધી પહોંચતું નથી અને વિરામ દરમિયાન આસપાસના તાપમાનમાં ઘટાડો થાય છે, તેને ટૂંકા ગાળાના કહેવામાં આવે છે.
મશીન ટૂલ્સ પર સહાયક ડ્રાઈવો (કેલિપર્સ, હેડ પેડ્સ, ક્રોસ આર્મ્સ વગેરે માટે ઝડપી ડ્રાઈવો) સામાન્ય રીતે ટૂંકા સમયના લોડ મોડમાં કાર્ય કરે છે. આવા સમયગાળાની ઇલેક્ટ્રિક ડ્રાઇવના સંચાલનની પદ્ધતિ, જેમાં ઇલેક્ટ્રિક ડ્રાઇવમાં સમાવિષ્ટ તમામ ઉપકરણોનું તાપમાન ઓપરેશન દરમિયાન સ્થિર મૂલ્ય સુધી પહોંચતું નથી અને વિરામ દરમિયાન આસપાસના તાપમાનમાં ઘટાડો થાય છે, તેને ટૂંકા ગાળાના કહેવામાં આવે છે.
મેટલ કટીંગ મશીનો પર સહાયક ડ્રાઈવોનો ઓપરેટિંગ સમય સામાન્ય રીતે ઓછો હોય છે; તે 5 - 15 સે કરતા વધુ નથી, અને માત્ર ભારે મશીનો માટે તે 1 - 1.5 મિનિટ સુધી પહોંચે છે. આ સમય દરમિયાન (t <0.1T) અનુમતિપાત્ર મર્યાદામાં ઓવરલોડ સાથે, ઇલેક્ટ્રિક મોટરમાં સામાન્ય ઓવરહિટીંગ સુધી પણ ગરમ થવાનો સમય નથી. આ કિસ્સામાં ઇલેક્ટ્રિક મોટરની રેટ કરેલ શક્તિ ઓવરલોડ શરતો દ્વારા નક્કી કરવામાં આવે છે.
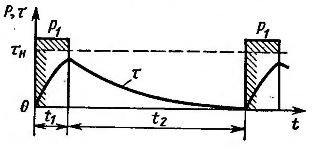
ચોખા. 1. ટૂંકા ગાળાની કામગીરી માટે લોડ વળાંક
સહાયક ડ્રાઇવના સંચાલન દરમિયાન Mc પ્રતિકારનો ક્ષણ મુખ્યત્વે ઘર્ષણ બળો દ્વારા બનાવવામાં આવે છે, અને તેથી આ ડ્રાઈવો, મુખ્ય ગતિની ડ્રાઈવોથી વિપરીત, નોંધપાત્ર પ્રારંભિક ટોર્કની જરૂર છે.
આડા ગતિશીલ મશીન તત્વને ખસેડતી વખતે ઘર્ષણ બળને દૂર કરવા માટે વપરાયેલી શક્તિ:

જ્યાં Ftp — ઘર્ષણનું બળ, N; v — વેગ, m/s; G — ખસેડવામાં આવતા એકમનું ગુરુત્વાકર્ષણ (વજન), N; μ — ગતિના ઘર્ષણનો ગુણાંક.
મોટર શાફ્ટ પાવર P = Ptr /η,
જ્યાં η — c. P. D. ટ્રાન્સમિશન, સામાન્ય રીતે η = 0.1 — 0.2.
માનવામાં આવેલા મોડમાં ઓપરેશન દરમિયાન ઇલેક્ટ્રિક મોટરની ગરમી નજીવી છે. તેથી, તેના અનુમતિપાત્ર ઓવરલોડનો ઉપયોગ કરવાની ભલામણ કરવામાં આવે છે.
રેટેડ પાવર Pn = Ptr /(λη),
જ્યાં λ — અનુમતિપાત્ર ઓવરલોડનો ગુણાંક.
આશરે, તે ધ્યાનમાં લઈ શકાય છે કે તેના કાર્યકારી ભાગમાં એન્જિનની લાક્ષણિકતા સ્પષ્ટ છે. પછી ઓવરલોડ ઓપરેશનમાં મોટરનો કોણીય વેગ
ωλ = ωО (1 — λсн),
જ્યાં, ωО = (πнО)/30- ઇલેક્ટ્રિક મોટરની સિંક્રનસ કોણીય ગતિ.
Pn = Ptr /(λη) સૂત્રનો ઉપયોગ કરીને, મોટરનો ઓવરલોડ ટોર્ક શોધો
એન્જિન શરૂ કરવાની શરૂઆતમાં પ્રતિકારની ક્ષણ તેના ઓપરેશન દરમિયાન કરતા વધારે છે. આ ક્ષણ
જ્યાં μО — બાકીના સમયે ઘર્ષણનો ગુણાંક.
મશીનની સહાયક ડ્રાઇવ્સની ઇલેક્ટ્રિક મોટર્સ પસંદ કરવાની પ્રક્રિયા
પ્રથમ, સૂત્ર Pn = Ptr /(λη) નો ઉપયોગ કરીને સૂચિમાંથી ઇલેક્ટ્રિક મોટર પસંદ કરવામાં આવે છે, જેના માટે પ્રારંભિક ટોર્ક Mnach પછી નક્કી કરવામાં આવે છે. સૂત્ર દ્વારા Mso ની ક્ષણની ગણતરી કરો અને Mnach ક્ષણ સાથે સરખામણી કરો.જો 0.85 Mnig> Mso હોય, તો પસંદ કરેલ મોટર સહાયક ડ્રાઇવ માટે યોગ્ય છે.
મશીન એકમોને ટર્નિંગ અને લિફ્ટિંગ કરવા માટેની ડ્રાઇવ્સની ગણતરી એ જ રીતે કરવામાં આવે છે, માત્ર પછીના કિસ્સામાં મુખ્ય ભાર ઘણીવાર ખસેડવામાં આવેલા એકમના ગુરુત્વાકર્ષણ (વજન) ના બળ દ્વારા બનાવવામાં આવે છે.
વર્કપીસ પર ટૂલનો ઝડપથી સંપર્ક કરવા માટે શ્રેષ્ઠ ગતિ પસંદ કરવાનું વિશેષ મહત્વ છે. ટૂલનો સંપર્ક કરતી વખતે, હાઇ-સ્પીડ ચળવળને કટીંગ સ્પીડ પર ધીમી ચળવળ દ્વારા બદલવામાં આવે છે. આ સ્પીડ ચેન્જ ત્યારે થાય છે જ્યારે ટૂલ ભાગથી થોડે દૂર હોય, અન્યથા ટૂલ વધુ ઝડપે ભાગને અથડાશે અને તૂટી જશે.
એક ગતિથી બીજી ગતિમાં સંક્રમણ થોડો સમય લે છે. આ સમય દરમિયાન, વિદ્યુત ઉપકરણો સક્રિય થાય છે અને હલનચલન વધુ ઝડપે ચાલુ રહે છે.વોલ્ટેજની વધઘટ અને અન્ય રેન્ડમ પરિબળોના પ્રભાવને કારણે સાધનોનો પ્રતિભાવ સમય બદલાય છે.
કાઇનેમેટિક ચેઇનમાં ગિયર્સની યોગ્ય પસંદગી દ્વારા શ્રેષ્ઠ ગતિ પ્રદાન કરવામાં આવે છે. રસ્તાના અંતિમ વિભાગની ગતિમાં ધીમે ધીમે અથવા સરળ સ્વચાલિત ઘટાડા દ્વારા સમયનો વધુ ઘટાડો શક્ય છે, જે ઉચ્ચ પ્રારંભિક ગતિ અપનાવવાનું શક્ય બનાવે છે.