ડિજિટલ ઉપકરણો: ફ્લિપ-ફ્લોપ, તુલનાકારો અને રજિસ્ટર
 ડિજિટલ ઉપકરણો તાર્કિક તત્વો પર બાંધવામાં આવે છે, તેથી તેઓ લોજિકલ બીજગણિતના નિયમોનું પાલન કરે છે. ડિજિટલ ટેક્નોલોજીના મૂળભૂત ઉપકરણો, તર્ક ઉપકરણો સાથે, ફ્લિપ-ફ્લોપ છે.
ડિજિટલ ઉપકરણો તાર્કિક તત્વો પર બાંધવામાં આવે છે, તેથી તેઓ લોજિકલ બીજગણિતના નિયમોનું પાલન કરે છે. ડિજિટલ ટેક્નોલોજીના મૂળભૂત ઉપકરણો, તર્ક ઉપકરણો સાથે, ફ્લિપ-ફ્લોપ છે.
ટ્રિગર (અંગ્રેજી ટ્રિગર - ટ્રિગર) - એક ઇલેક્ટ્રોનિક ઉપકરણ જે બે સ્થિર સ્થિતિ ધરાવે છે અને બાહ્ય આવેગના પ્રભાવ હેઠળ એક રાજ્યથી બીજી સ્થિતિમાં કૂદી શકે છે.
ટ્રિગર્સ અથવા, વધુ સ્પષ્ટ રીતે, ટ્રિગર સિસ્ટમ્સને ઇલેક્ટ્રોનિક ઉપકરણોનો મોટો વર્ગ કહેવામાં આવે છે જે લાંબા સમય સુધી બેમાંથી એક સ્થિર સ્થિતિમાં રહેવાની અને બાહ્ય સંકેતોના પ્રભાવ હેઠળ તેમને વૈકલ્પિક કરવાની ક્ષમતા ધરાવે છે. દરેક ટ્રિગર સ્થિતિ આઉટપુટ વોલ્ટેજ મૂલ્ય દ્વારા સરળતાથી ઓળખાય છે.
દરેક ટ્રિગર સ્ટેટ ચોક્કસ (ઉચ્ચ અથવા નીચું) આઉટપુટ વોલ્ટેજ સ્તરને અનુરૂપ છે:
1) ટ્રિગર એક રાજ્ય પર સેટ છે - સ્તર «1».
2) ફ્લિપ-ફ્લોપ રીસેટ છે — આઉટપુટ પર સ્તર «0».
સ્થિર સ્થિતિ ઇચ્છિત હોય ત્યાં સુધી રહે છે અને તેને બાહ્ય પલ્સ દ્વારા અથવા સપ્લાય વોલ્ટેજને બંધ કરીને બદલી શકાય છે. ચે.ફ્લિપ-ફ્લોપ એ પ્રાથમિક મેમરી તત્વ છે જે માહિતીના સૌથી નાના એકમ (એક બીટ) «0» અથવા «1»ને સંગ્રહિત કરવામાં સક્ષમ છે.
ફ્લિપ-ફ્લોપ્સ અલગ તત્વો, તર્ક તત્વો, સંકલિત સર્કિટ પર અથવા એકીકૃત સર્કિટનો ભાગ હોઈ શકે છે.
ફ્લિપ-ફ્લોપના મુખ્ય પ્રકારોમાં નીચેનાનો સમાવેશ થાય છે: RS-, D-, T- અને JK-ફ્લિપર્સ... વધુમાં, ફ્લિપ-ફ્લોપને અસુમેળ અને સિંક્રનસમાં વિભાજિત કરવામાં આવે છે. અસુમેળ પ્રવૃતિમાં, માહિતી ઇનપુટના સિગ્નલના આગમન સાથે એક રાજ્યથી બીજા રાજ્યમાં સ્વિચ કરવું સીધું જ થાય છે. ડેટા ઇનપુટ્સ ઉપરાંત, સિંક્રનાઇઝ્ડ ફ્લિપ-ફ્લોપ્સમાં ઘડિયાળ ઇનપુટ હોય છે. તેમનું સ્વિચિંગ ફક્ત સક્ષમ ઘડિયાળના પલ્સની હાજરીમાં જ થાય છે.
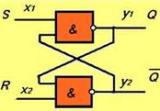
આરએસ ટ્રિગરમાં ઓછામાં ઓછા બે ઇનપુટ્સ હોય છે: S (સેટ — સેટ) — ટ્રિગર સ્તર «1» અને R (રીસેટ) ની સ્થિતિ પર સેટ છે — ટ્રિગર સ્તર «0» ની સ્થિતિ પર ફરીથી સેટ કરવામાં આવે છે. (ફિગ. 1).
ઇનપુટ Cની હાજરીમાં, ફ્લિપ-ફ્લોપ સિંક્રનસ છે — ફ્લિપ-ફ્લોપનું સ્વિચિંગ (આઉટપુટની સ્થિતિમાં ફેરફાર) ફક્ત ઇનપુટ C પર સિંક્રનાઇઝિંગ (સિંક્રોનાઇઝિંગ) પલ્સના આગમનની ક્ષણે થઈ શકે છે.

આકૃતિ 1 — RS ફ્લિપ-ફ્લોપની પરંપરાગત ગ્રાફિકલ રજૂઆત અને નિષ્કર્ષનો હેતુ a) અસુમેળ, b) સિંક્રનસ
ડાયરેક્ટ આઉટપુટ ઉપરાંત, ફ્લિપ-ફ્લોપમાં વ્યસ્ત આઉટપુટ પણ હોઈ શકે છે, જેનો સંકેત વિરુદ્ધ હશે.
કોષ્ટક 1 ઓપરેશન દરમિયાન ફ્લિપ-ફ્લોપ ધારણ કરી શકે તેવા રાજ્યો બતાવે છે. કોષ્ટક tn ની ચોક્કસ ક્ષણે ઇનપુટ સિગ્નલ S અને R ના મૂલ્યો અને આગલા સમયના આગમન પછી tn + 1 સમયની આગલી ક્ષણે ફ્લિપ-ફ્લોપ (ડાયરેક્ટ આઉટપુટની) ની સ્થિતિ દર્શાવે છે. કઠોળ નવી ટ્રિગર સ્થિતિ Q n ની અગાઉની સ્થિતિથી પણ પ્રભાવિત છે.
ચે.જો ટ્રિગર «1» પર લખવું જરૂરી હોય તો - અમે S ઇનપુટને પલ્સ આપીએ છીએ, જો «0» - અમે R ઇનપુટ પર પલ્સ મોકલીએ છીએ.
સંયોજન S = 1, R = 1 એ પ્રતિબંધિત સંયોજન છે કારણ કે આઉટપુટ પર કઈ સ્થિતિ સ્થાપિત થશે તેની આગાહી કરવી અશક્ય છે.
કોષ્ટક 1 - સિંક્રનસ RS ફ્લિપ-ફ્લોપ સ્ટેટ ટેબલ

ફ્લિપ-ફ્લોપનું ઑપરેશન ટાઇમિંગ ડાયાગ્રામ (ફિગ. 2) નો ઉપયોગ કરીને પણ જોઈ શકાય છે.
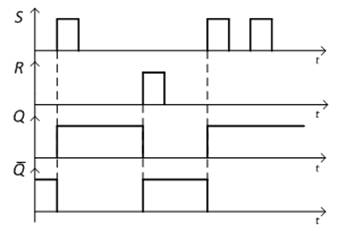
આકૃતિ 2 — અસુમેળ RS ફ્લિપ-ફ્લોપના સમય આકૃતિઓ
ડી-ટ્રિગર (અંગ્રેજી વિલંબ — વિલંબમાંથી) એક માહિતી ઇનપુટ અને ઘડિયાળ (સિંક્રોનાઇઝ) ઇનપુટ (ફિગ. 3) ધરાવે છે.
D-ફ્લિપ-ફ્લોપ આઉટપુટ Q સિગ્નલને સ્ટોર કરે છે અને સ્ટોર કરે છે જે ઘડિયાળ પલ્સ C ના આગમન સમયે ડેટા ઇનપુટ D પર હતો. ફ્લિપ-ફ્લોપ C = 1 હોય ત્યારે લખેલી માહિતીનો સંગ્રહ કરે છે.
કોષ્ટક 2-ડી-ફ્લિપ-ફ્લોપના રાજ્યોનું કોષ્ટક

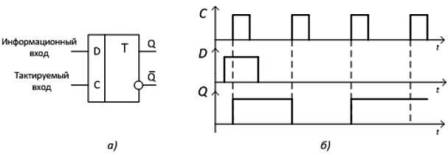
આકૃતિ 3 — D -ટ્રિગર: a) પરંપરાગત ગ્રાફિકલ રજૂઆત, b) કામગીરીના સમય આકૃતિઓ
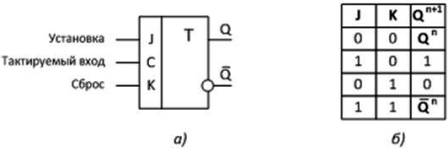
ટી-ટ્રિગર્સ (અંગ્રેજી ટમ્બલમાંથી — ઓવરટર્નિંગ, સમરસૉલ્ટ), જેને કાઉન્ટિંગ ફ્લિપ-ફ્લોપ પણ કહેવાય છે, તેમાં એક માહિતી ઇનપુટ T હોય છે. T-ઇનપુટ (કાઉન્ટિંગ ઇનપુટ) ની દરેક પલ્સ (પલ્સ સડો) ટ્રિગરને વિરુદ્ધ સ્થિતિમાં ફેરવે છે.
આકૃતિ 4 T-ટ્રિગર સિમ્બોલોજી (a) અને ઓપરેશનના સમય આકૃતિઓ (b) દર્શાવે છે.
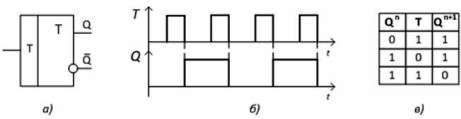
આકૃતિ 4-T-ફ્લિપ-ફ્લોપ a) પરંપરાગત-ગ્રાફિક સંકેત, b) ઓપરેશનના સમય આકૃતિઓ c) સ્ટેટ ટેબલ
JK ટ્રિગર (અંગ્રેજી જમ્પ - જમ્પ, કીર — હોલ્ડમાંથી) બે ડેટા ઇનપુટ J અને K અને એક ઘડિયાળ ઇનપુટ C ધરાવે છે. પિન J અને K ની સોંપણી પિન R અને S ની સોંપણી સમાન છે, પરંતુ ટ્રિગર પાસે છે કોઈ પ્રતિબંધિત સંયોજનો નથી. જો J = K = 1, તો તે તેની સ્થિતિને વિરુદ્ધમાં બદલે છે (ફિગ. 5).
ઇનપુટ્સના યોગ્ય જોડાણ સાથે, ટ્રિગર RS-, D-, T-ટ્રિગર્સ, એટલે કે, ના કાર્યો કરી શકે છે. એક સાર્વત્રિક ટ્રિગર છે.
આકૃતિ 5 -JK -ફ્લિપ-ફ્લોપ a) પરંપરાગત -ગ્રાફિક સંકેત, b) સંક્ષિપ્ત સ્ટેટ ટેબલ
કમ્પેરેટર (સરખાવો — સરખામણી કરો) — એક ઉપકરણ કે જે બે વોલ્ટેજની તુલના કરે છે — સંદર્ભ Uref સાથે Uin ઇનપુટ કરો. સંદર્ભ વોલ્ટેજ એ સકારાત્મક અથવા નકારાત્મક ધ્રુવીયતા સાથે સતત વોલ્ટેજ છે, ઇનપુટ વોલ્ટેજ સમય સાથે બદલાય છે. ઓપરેશનલ એમ્પ્લીફાયર પર આધારિત સૌથી સરળ તુલનાત્મક સર્કિટ આકૃતિ 6, a માં બતાવવામાં આવ્યું છે. જો Uin Uop આઉટપુટ પર U — us (ફિગ. 6, b).
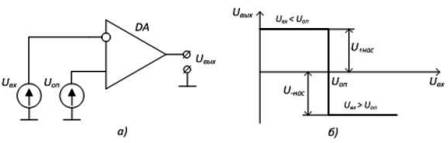
આકૃતિ 6 — ઓપ-એમ્પ કમ્પેરેટર: a) સૌથી સરળ સ્કીમ b) પ્રદર્શન લાક્ષણિકતાઓ
હકારાત્મક પ્રતિસાદની તુલના કરનારને શ્મિટ ટ્રિગર કહેવામાં આવે છે. જો તુલનાકાર «1» થી «0» અને તેનાથી વિપરીત સમાન વોલ્ટેજ પર સ્વિચ કરે છે, તો પછી શ્મિટ ટ્રિગર - વિવિધ વોલ્ટેજ પર. સંદર્ભ વોલ્ટેજ PIC સર્કિટ R1R2 બનાવે છે, ઇનપુટ સિગ્નલ ઓપ-એમ્પના ઇનવર્ટિંગ ઇનપુટને આપવામાં આવે છે. આકૃતિ 7, b, શ્મિટ ટ્રિગરની ટ્રાન્સફર લાક્ષણિકતા દર્શાવે છે.
OS Uout = U + sat ના ઇન્વેન્ટરી ઇનપુટ પર નકારાત્મક વોલ્ટેજ પર. આનો અર્થ એ છે કે પોઝિટિવ વોલ્ટેજ બિન-ઇનવર્ટિંગ ઇનપુટ પર કાર્ય કરે છે. જેમ જેમ ઇનપુટ વોલ્ટેજ વધે છે તેમ, વર્તમાન Uin > Uneinv. (Uav — ટ્રિગર) તુલના કરનાર રાજ્ય Uout = U -sat પર જાય છે. બિન-ઇનવર્ટિંગ ઇનપુટ પર નકારાત્મક વોલ્ટેજ લાગુ કરવામાં આવે છે. તદનુસાર, આ ક્ષણે ઇનપુટ વોલ્ટેજમાં ઘટાડા સાથે Uin <Uneinv. (Uav — ટ્રિગર) તુલનાકાર સ્થિતિમાં જાય છે Uout = U + sat.
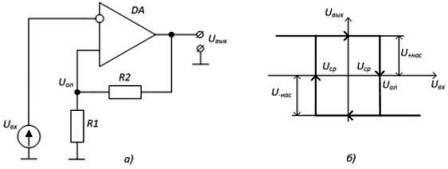
આકૃતિ 7 — ઓપ-એમ્પનું શ્મિટ ઓપરેશન: એ) સૌથી સરળ સ્કીમ b) પ્રદર્શન લાક્ષણિકતાઓ
એક ઉદાહરણ. આકૃતિ 8 ઇલેક્ટ્રિક મોટરને નિયંત્રિત કરવા માટે રિલે-કોન્ટેક્ટરની યોજના દર્શાવે છે, જે તેને શરૂ કરવા, રોકવા અને ઉલટાવી શકે છે.
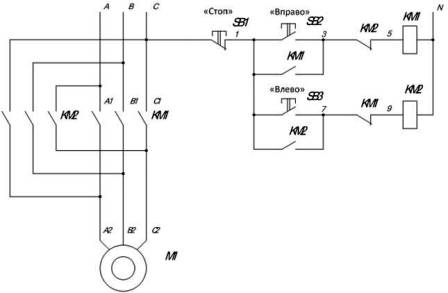
આકૃતિ 8 — રિલે-કોન્ટેક્ટર મોટર કંટ્રોલ સ્કીમ
ઇલેક્ટ્રિક મોટરનું પરિવર્તન ચુંબકીય સ્ટાર્ટર KM1, KM2 દ્વારા કરવામાં આવે છે. મુક્તપણે બંધ સંપર્કો KM1, KM2 ચુંબકીય સ્ટાર્ટર્સના એકસાથે ઓપરેશનને અટકાવે છે. મુક્તપણે ખુલ્લા સંપર્કો KM1, KM2 SB2 અને SB3 બટનોનું સ્વ-લોકિંગ પ્રદાન કરે છે.
ઓપરેશનની વિશ્વસનીયતા સુધારવા માટે, સેમિકન્ડક્ટર ઉપકરણો અને ઉપકરણોનો ઉપયોગ કરીને બિન-સંપર્ક સિસ્ટમ સાથે રિલે-કોન્ટેક્ટર કંટ્રોલ સર્કિટ અને પાવર સર્કિટ્સને બદલવું જરૂરી છે.
આકૃતિ 9 કોન્ટેક્ટલેસ મોટર કંટ્રોલ સર્કિટ બતાવે છે.
મેગ્નેટિક સ્ટાર્ટર્સના પાવર કોન્ટેક્ટ્સને ઓપ્ટો-સિમિસ્ટરથી બદલવામાં આવ્યા હતા: KM1-VS1-VS3, KM2-VS4-VS6. ઓપ્ટોસિમિસ્ટરનો ઉપયોગ શક્તિશાળી સપ્લાય સર્કિટમાંથી નીચા-વર્તમાન નિયંત્રણ સર્કિટને અલગ કરવાનું શક્ય બનાવે છે.
ટ્રિગર્સ સ્વ-લોકીંગ બટનો SB2, SB3 પ્રદાન કરે છે. તર્ક તત્વો અને માત્ર એક જ ચુંબકીય શરૂઆતના એક સાથે સક્રિયકરણની ખાતરી કરે છે.
જ્યારે ટ્રાન્ઝિસ્ટર VT1 ખુલે છે, ત્યારે ઓપ્ટો-સિમિસ્ટર VS1-VS3 ના પ્રથમ જૂથના LEDs દ્વારા પ્રવાહ વહે છે, જેનાથી મોટર વિન્ડિંગ્સ દ્વારા પ્રવાહનો પ્રવાહ સુનિશ્ચિત થાય છે. ટ્રાન્ઝિસ્ટર VT2 નું ઉદઘાટન ઓપ્ટો-સિમિસ્ટર VS4 ના બીજા જૂથને સપ્લાય કરે છે. -VS6, બીજી દિશામાં ઇલેક્ટ્રિક મોટરના પરિભ્રમણની ખાતરી કરે છે.
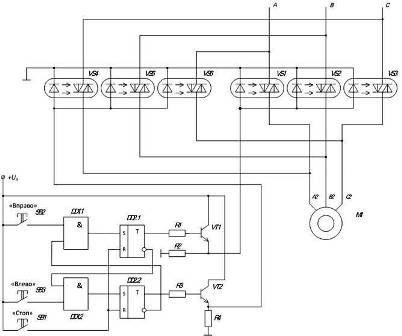
આકૃતિ 9 — કોન્ટેક્ટલેસ મોટર કંટ્રોલ સર્કિટ
નોંધણી કરો - ટૂંકા ગાળાના સ્ટોરેજ અને બહુ-અંકની દ્વિસંગી સંખ્યાઓના રૂપાંતર માટે રચાયેલ ઇલેક્ટ્રોનિક ઉપકરણ. રજિસ્ટરમાં ફ્લિપ-ફ્લોપનો સમાવેશ થાય છે, જેની સંખ્યા નક્કી કરે છે કે રજિસ્ટર બાઈનરી નંબરના કેટલા બિટ્સ સ્ટોર કરી શકે છે — રજિસ્ટરનું કદ (ફિગ. 10, a). ટ્રિગર્સના ઑપરેશનને ગોઠવવા માટે લોજિક તત્વોનો ઉપયોગ કરી શકાય છે.
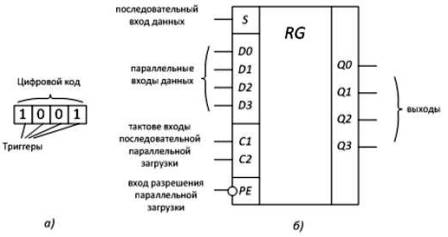
આકૃતિ 10 — નોંધણી કરો: a) સામાન્ય રજૂઆત, b) પરંપરાગત ગ્રાફિકલ નોટેશન
માહિતીના ઇનપુટ અને આઉટપુટની પદ્ધતિ અનુસાર, રજીસ્ટરને સમાંતર અને સીરીયલમાં વિભાજિત કરવામાં આવે છે.
ક્રમિક રજિસ્ટરમાં, ફ્લિપ-ફ્લોપ શ્રેણીમાં જોડાયેલા હોય છે, એટલે કે, અગાઉના ફ્લિપ-ફ્લોપના આઉટપુટ આગામી ફ્લિપ-ફ્લોપના ઇનપુટ્સને માહિતી આપે છે. ફ્લિપ-ફ્લોપ ઘડિયાળના ઇનપુટ્સ C સમાંતર રીતે જોડાયેલા છે. આવા રજિસ્ટરમાં એક ડેટા ઇનપુટ અને કંટ્રોલ ઇનપુટ હોય છે - ઘડિયાળ ઇનપુટ C.
એક સમાંતર રજિસ્ટર એકસાથે ફ્લિપ-ફ્લોપ પર લખે છે જેના માટે ચાર ડેટા ઇનપુટ્સ છે.
આકૃતિ 10 UGO અને ચાર-બીટ સમાંતર-સિરીયલ રજીસ્ટરની પિન ફાળવણી દર્શાવે છે.