વૈકલ્પિક વર્તમાન વિદ્યુત મશીનો
ઇલેક્ટ્રિક મશીનોનો ઉપયોગ યાંત્રિક ઊર્જાને વિદ્યુત ઊર્જા (AC અને DC જનરેટર) અને ઊલટું (ઇલેક્ટ્રિક મોટર્સ)માં રૂપાંતરિત કરવા માટે થાય છે.
આ તમામ કિસ્સાઓમાં, ઇલેક્ટ્રોમેગ્નેટિઝમના ક્ષેત્રમાં આવશ્યકપણે ત્રણ મુખ્ય શોધોનો ઉપયોગ કરવામાં આવે છે: 1821 માં એમ્પીયર દ્વારા શોધાયેલ પ્રવાહોની યાંત્રિક ક્રિયાપ્રતિક્રિયાની ઘટના, 1831 માં ફેરાડે દ્વારા શોધાયેલ ઇલેક્ટ્રોમેગ્નેટિક ઇન્ડક્શનની ઘટના, અને આ ઘટનાનો સૈદ્ધાંતિક સારાંશ લેન્ઝ (1834) તેમના પ્રેરિત પ્રવાહની દિશાના જાણીતા કાયદામાં (હકીકતમાં, લેન્ઝનો કાયદો ઇલેક્ટ્રોમેગ્નેટિક પ્રક્રિયાઓ માટે ઊર્જાના સંરક્ષણના કાયદાની આગાહી કરે છે).

યાંત્રિક ઉર્જાને વિદ્યુત ઊર્જામાં રૂપાંતરિત કરવા અથવા તેનાથી વિપરીત, વર્તમાન અને ચુંબકીય ક્ષેત્ર (ચુંબક અથવા વર્તમાન) સાથે વાહક સર્કિટની સંબંધિત હિલચાલ બનાવવી જરૂરી છે.
સતત કામગીરી માટે રચાયેલ ઇલેક્ટ્રિક મશીનોમાં, સ્થિર ભાગ (સ્ટેટર) ની અંદર સ્થિત મશીનના ફરતા ભાગ (વૈકલ્પિક વર્તમાન મશીનના રોટર) ની રોટરી ગતિનો ઉપયોગ થાય છે.મશીનની કોઇલ કે જે ચુંબકીય ક્ષેત્ર બનાવવાનું કામ કરે છે તેને ઇન્ડક્ટર કહેવામાં આવે છે, અને કોઇલ જે ઓપરેટિંગ પ્રવાહ સાથે વહે છે તેને આર્મેચર કહેવામાં આવે છે. આ બંને પછીના શબ્દોનો ઉપયોગ DC મશીનો માટે પણ થાય છે.
ચુંબકીય ઇન્ડક્શન વધારવા માટે, મશીન વિન્ડિંગ્સ ફેરોમેગ્નેટિક બોડી (સ્ટીલ, કાસ્ટ આયર્ન) પર મૂકવામાં આવે છે.
તમામ ઇલેક્ટ્રિક મશીનોમાં ઉલટાવી શકાય તેવી મિલકત હોય છે, એટલે કે, તેનો ઉપયોગ વિદ્યુત ઊર્જાના જનરેટર અને ઇલેક્ટ્રિક મોટર્સ તરીકે બંને તરીકે થઈ શકે છે.

અસુમેળ મોટર્સ
અસુમેળ મોટરનો ઉપયોગ થાય છે ઇલેક્ટ્રોમેગ્નેટિક ઇન્ડક્શનના અભિવ્યક્તિઓમાંથી એક… ભૌતિકશાસ્ત્રના અભ્યાસક્રમોમાં તે નીચે પ્રમાણે દર્શાવવામાં આવે છે:
તાંબાની ડિસ્કની નીચે, જે તેના કેન્દ્રમાંથી પસાર થતી ઊભી અક્ષની આસપાસ ફેરવી શકે છે, તેને સમાન ધરીની આસપાસ ફેરવવા માટે ચલાવવામાં આવેલું ઊભું ઘોડાની નાળનું ચુંબક મૂકવામાં આવે છે (ડિસ્ક અને ચુંબક વચ્ચેની યાંત્રિક ક્રિયાપ્રતિક્રિયાને બાકાત રાખવામાં આવે છે). આ કિસ્સામાં, ડિસ્ક ચુંબકની જેમ જ દિશામાં ફેરવવાનું શરૂ કરે છે, પરંતુ ઓછી ઝડપે. જો તમે ડિસ્ક પર યાંત્રિક લોડ વધારશો (ઉદાહરણ તરીકે, થ્રસ્ટ બેરિંગ સામે એક્સેલના ઘર્ષણને વધારીને), તો તેની પરિભ્રમણ ગતિ ઘટે છે.
આ ઘટનાનો ભૌતિક અર્થ ઇલેક્ટ્રોમેગ્નેટિક ઇન્ડક્શનના સિદ્ધાંત દ્વારા સરળતાથી સમજાવવામાં આવે છે: જ્યારે ચુંબક ફરે છે, ત્યારે ફરતું ચુંબકીય ક્ષેત્ર બનાવવામાં આવે છે, જે ડિસ્કમાં એડી પ્રવાહોને પ્રેરિત કરે છે, બાદમાંની તીવ્રતા આધાર રાખે છે, અન્ય વસ્તુઓ સમાન હોવા પર, ક્ષેત્ર અને ડિસ્કની સંબંધિત ગતિ.
લેન્ઝના કાયદા અનુસાર, ડિસ્કને ક્ષેત્રની દિશામાં ફેરવવી આવશ્યક છે. ઘર્ષણની ગેરહાજરીમાં, ડિસ્કને ચુંબકના વેગ જેટલી કોણીય વેગ પ્રાપ્ત કરવી આવશ્યક છે, જેના પછી પ્રેરિત ઇએમએફ અદૃશ્ય થઈ જશે. વાસ્તવિક જીવનમાં, ઘર્ષણ અનિવાર્યપણે હાજર છે અને ડિસ્ક ધીમી બને છે.તેની તીવ્રતા ડિસ્ક દ્વારા અનુભવાયેલી યાંત્રિક બ્રેકિંગ ક્ષણ પર આધારિત છે.
ડિસ્ક (રોટર) ના પરિભ્રમણની ગતિ અને ચુંબકીય ક્ષેત્રના પરિભ્રમણની ગતિ વચ્ચેની વિસંગતતા મોટર્સના નામમાં પ્રતિબિંબિત થાય છે.
અસુમેળ મોટર્સના સંચાલનના સિદ્ધાંત:
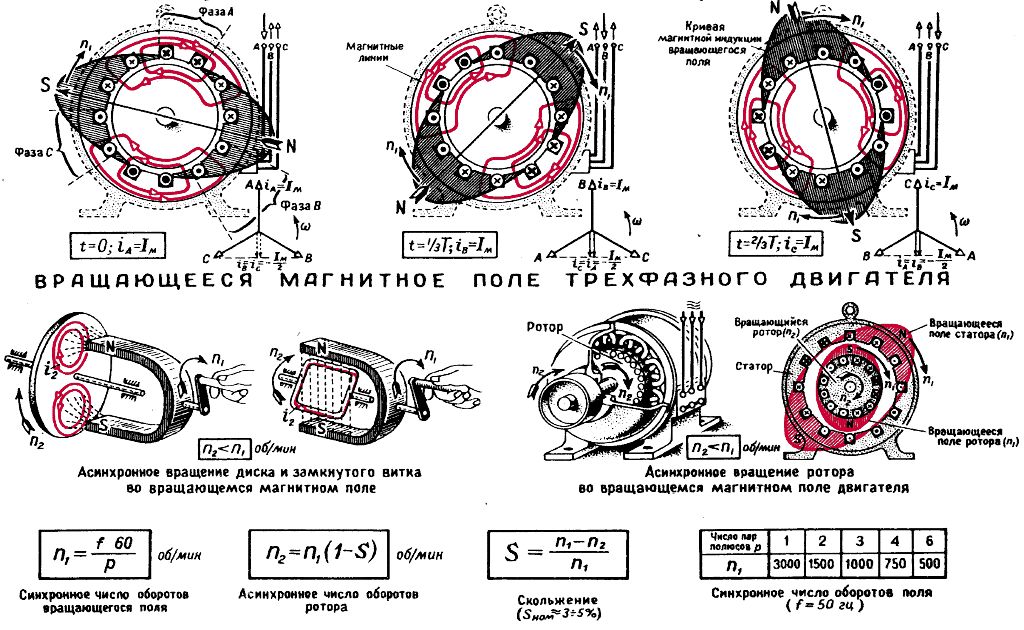
તકનીકી અસુમેળ મોટર્સમાં (મોટાભાગે ત્રણ-તબક્કા) એક ફરતું ચુંબકીય ક્ષેત્ર બનાવવામાં આવે છે પોલિફેસ વર્તમાનસ્થિર સ્ટેટર વિન્ડિંગની આસપાસ વહે છે. ત્રણ-તબક્કાના પ્રવાહની આવર્તન પર છે અને સ્ટેટર કોઇલની સંખ્યા 3p ફરતી ક્ષેત્ર n = f/p ક્રાંતિ / સેકન્ડ બનાવે છે.

સ્ટેટર કેવિટીમાં રોટેટેબલ રોટર સ્થિત છે. ફરતી મિકેનિઝમ તેના શાફ્ટ સાથે જોડી શકાય છે. સૌથી સરળ "ખિસકોલી સેલ" મોટર્સમાં, રોટરમાં સ્ટીલના નળાકાર શરીરના ગ્રુવ્સમાં મૂકવામાં આવેલા રેખાંશ ધાતુના સળિયાઓની સિસ્ટમ હોય છે. વાયર બે રિંગ્સ દ્વારા શોર્ટ-સર્ક્યુટ થાય છે. ટોર્ક વધારવા માટે, રોટરની ત્રિજ્યા પૂરતી મોટી બનાવવામાં આવે છે.
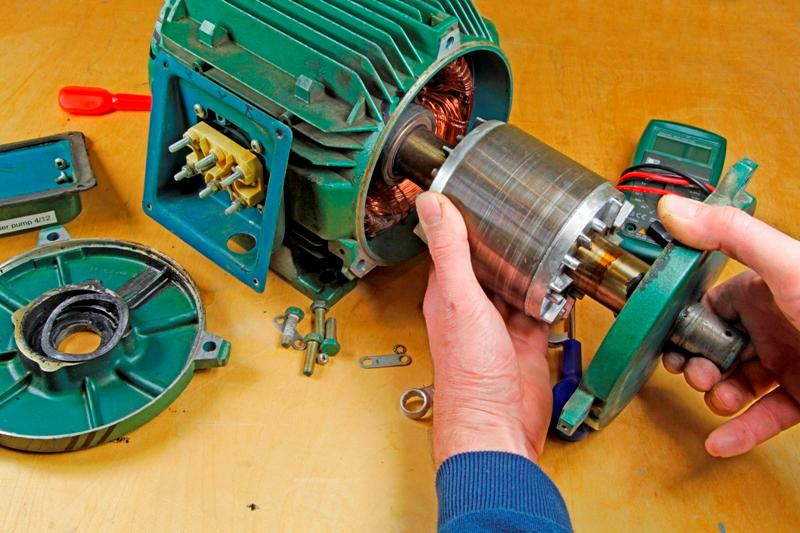
અન્ય મોટર ડિઝાઇનમાં (સામાન્ય રીતે હાઇ પાવર મોટર્સ), રોટર વાયર એક ખુલ્લા ત્રણ તબક્કાના વિન્ડિંગ બનાવે છે. કોઇલના છેડા રોટરમાં જ શોર્ટ-સર્ક્યુટેડ હોય છે અને રોટર શાફ્ટ પર લગાવેલા ત્રણ સ્લિપ રિંગ્સમાં લીડ્સ બહાર લાવવામાં આવે છે અને તેનાથી અલગ કરવામાં આવે છે.
સ્લાઇડિંગ કોન્ટેક્ટ્સ (બ્રશ) નો ઉપયોગ કરીને આ રિંગ્સ સાથે ત્રણ-તબક્કાની રિઓસ્ટેટ જોડાયેલ છે, જે મોટરને ગતિમાં શરૂ કરવા માટે સેવા આપે છે. મોટર ચાલુ થયા પછી, રિઓસ્ટેટ સંપૂર્ણપણે દૂર થઈ જાય છે અને રોટર ખિસકોલીનું પાંજરું બની જાય છે (જુઓ — ઘા રોટર સાથે અસુમેળ મોટર્સ).

સ્ટેટર હાઉસિંગ પર ટર્મિનલ બોર્ડ છે. સ્ટેટર વિન્ડિંગ્સ તેમને બહાર લાવવામાં આવે છે. તેઓનો સમાવેશ કરી શકાય છે તારો અથવા ત્રિકોણ, મુખ્ય વોલ્ટેજ પર આધાર રાખીને: પ્રથમ કિસ્સામાં મુખ્ય વોલ્ટેજ બીજા કરતા 1.73 ગણો વધારે હોઈ શકે છે.
ઇન્ડક્શન મોટરના સ્ટેટર ફિલ્ડની તુલનામાં રોટરના સંબંધિત મંદીને દર્શાવતું મૂલ્ય કહેવાય છે. લપસી જવું… તે 100% (મોટર શરૂ કરવાની ક્ષણે) થી શૂન્ય (લોસલેસ રોટર હિલચાલનો આદર્શ કેસ) માં બદલાય છે.
મોટરને સપ્લાય કરતા વિદ્યુત નેટવર્કના દરેક બે રેખીય વાહકના પરસ્પર સ્વિચિંગ દ્વારા ઇન્ડક્શન મોટરના પરિભ્રમણની દિશાને ઉલટાવી શકાય છે.

ખિસકોલી કેજ મોટર્સનો ઉદ્યોગમાં વ્યાપકપણે ઉપયોગ થાય છે. અસુમેળ મોટર્સના ફાયદા એ ડિઝાઇનની સરળતા અને સ્લાઇડિંગ સંપર્કોની ગેરહાજરી છે.
તાજેતરમાં સુધી, આવા મોટર્સનો મુખ્ય ગેરલાભ એ સ્પીડ રેગ્યુલેશનમાં મુશ્કેલી હતી, કારણ કે જો આ માટે સ્ટેટર સર્કિટનું વોલ્ટેજ બદલવામાં આવે છે, તો ટોર્કમાં તીવ્ર ફેરફાર થાય છે, પરંતુ સપ્લાય વર્તમાનની આવર્તન બદલવી તકનીકી રીતે મુશ્કેલ હતું. આધુનિક માઇક્રોપ્રોસેસર ઉપકરણોનો ઉપયોગ હવે મોટર્સની ગતિમાં ફેરફાર કરવા માટે સપ્લાય કરંટની આવર્તનને નિયંત્રિત કરવા માટે વ્યાપકપણે થાય છે — ફ્રીક્વન્સી કન્વર્ટર.
વૈકલ્પિક
અલ્ટરનેટર નોંધપાત્ર પાવર અને ઉચ્ચ વોલ્ટેજ માટે બાંધવામાં આવે છે. અસુમેળ મશીનોની જેમ, તેમની પાસે બે વિન્ડિંગ્સ છે. સામાન્ય રીતે, આર્મેચર વિન્ડિંગ સ્ટેટર હાઉસિંગમાં સ્થિત હોય છે. પ્રાથમિક ચુંબકીય પ્રવાહ બનાવે છે તે ઇન્ડક્ટર રોટર પર માઉન્ટ થયેલ છે અને એક એક્સાઇટર દ્વારા સંચાલિત થાય છે - રોટર શાફ્ટ પર માઉન્ટ થયેલ એક નાનું ડીસી જનરેટર. ઉચ્ચ-સંચાલિત મશીનોમાં, ઉત્તેજના ક્યારેક સુધારેલા વૈકલ્પિક વોલ્ટેજ દ્વારા બનાવવામાં આવે છે.
આર્મેચર વિન્ડિંગની સ્થિરતાને લીધે, ઉચ્ચ શક્તિઓ પર સ્લાઇડિંગ સંપર્કોના ઉપયોગ સાથે સંકળાયેલ તકનીકી મુશ્કેલીઓ અદૃશ્ય થઈ જાય છે.
નીચેની આકૃતિ સિંગલ-ફેઝ જનરેટરની યોજના દર્શાવે છે. તેના રોટરમાં આઠ ધ્રુવો છે. આના પર રોટર શાફ્ટ પર માઉન્ટ થયેલ સ્લિપ રિંગ્સ પર સીધો પ્રવાહ લાગુ કરીને બાહ્ય સ્ત્રોતમાંથી ખવડાવવામાં આવેલ ઘા કોઇલ (આકૃતિમાં બતાવેલ નથી). ધ્રુવ કોઇલ એવી રીતે ઘાયલ થાય છે કે સ્ટેટર તરફના ધ્રુવોના ચિહ્નો વૈકલ્પિક રીતે સામનો કરે છે. ધ્રુવોની સંખ્યા સમાન હોવી જોઈએ.
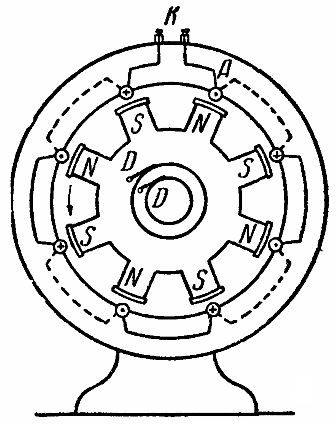
આર્મેચર વિન્ડિંગ સ્ટેટર હાઉસિંગમાં સ્થિત છે. તેના લાંબા કામ કરતા "સક્રિય" વાયર, ડ્રોઇંગના પ્લેન પર લંબરૂપ છે, વર્તુળો સાથે આકૃતિમાં બતાવવામાં આવે છે, જ્યારે રોટર ફરે છે ત્યારે તે ચુંબકીય ઇન્ડક્શનની રેખાઓ દ્વારા ઓળંગી જાય છે.
વર્તુળો પ્રેરિત વિદ્યુત ક્ષેત્રોની દિશાઓનું ત્વરિત વિતરણ દર્શાવે છે. સ્ટેટરની આગળની બાજુએ ચાલતા કનેક્ટિંગ વાયરને નક્કર રેખાઓ સાથે અને પાછળની બાજુએ ડૅશ કરેલી રેખાઓ સાથે બતાવવામાં આવે છે. K clamps નો ઉપયોગ સ્ટેટર વિન્ડિંગ સાથે બાહ્ય સર્કિટને જોડવા માટે થાય છે. રોટરના પરિભ્રમણની દિશા તીર દ્વારા સૂચવવામાં આવે છે.
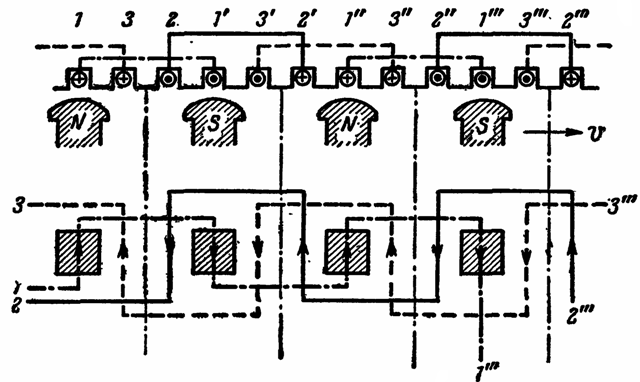
જો તમે ક્લેમ્પ્સ K વચ્ચે પસાર થતી ત્રિજ્યા સાથે મશીનને માનસિક રીતે કાપી નાખો અને તેને પ્લેનમાં ફેરવો, તો સ્ટેટર વિન્ડિંગ અને રોટર ધ્રુવો (બાજુ અને યોજના) ની સંબંધિત સ્થિતિને યોજનાકીય ચિત્ર સાથે દર્શાવવામાં આવશે:
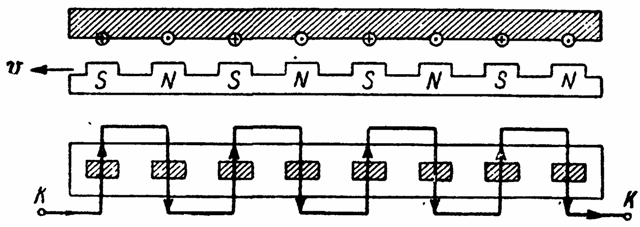
આકૃતિને ધ્યાનમાં લેતા, અમે ખાતરી કરીએ છીએ કે તમામ સક્રિય વાયર (ઇન્ડક્ટરના ધ્રુવોમાંથી પસાર થતા) એકબીજા સાથે શ્રેણીમાં જોડાયેલા છે અને તેમાં પ્રેરિત EMFનો સરવાળો છે. બધા EMF ના તબક્કા દેખીતી રીતે સમાન છે.રોટરના એક સંપૂર્ણ પરિભ્રમણ દરમિયાન, દરેક વાયરમાં (અને તેથી બાહ્ય સર્કિટમાં) વર્તમાન પરિવર્તનના ચાર સંપૂર્ણ સમયગાળા પ્રાપ્ત થશે.
જો વિદ્યુત મશીનમાં p ધ્રુવોની જોડી હોય અને રોટર n રિવોલ્યુશન પ્રતિ સેકન્ડે ફરે છે, તો મશીન દ્વારા પ્રાપ્ત વૈકલ્પિક પ્રવાહની આવૃત્તિ f = pn hz છે.
નેટવર્કમાં EMF ની આવર્તન સતત હોવી જ જોઈએ, તેથી રોટર્સના પરિભ્રમણની ગતિ સતત હોવી જોઈએ. તકનીકી આવર્તન (50 હર્ટ્ઝ) નું EMF મેળવવા માટે, જો રોટર ધ્રુવોની સંખ્યા પૂરતી મોટી હોય તો પ્રમાણમાં ધીમી પરિભ્રમણનો ઉપયોગ કરી શકાય છે.
ત્રણ તબક્કાના વર્તમાન મેળવવા માટે, સ્ટેટર બોડીમાં ત્રણ અલગ વિન્ડિંગ્સ મૂકવામાં આવે છે. તેમાંના દરેક ઇન્ડક્ટર્સના અડીને (વિરુદ્ધ) ધ્રુવો વચ્ચેના ચાપ અંતરના ત્રીજા ભાગ દ્વારા અન્ય બેની તુલનામાં સરભર કરવામાં આવે છે.
તે ચકાસવું સરળ છે કે જ્યારે ઇન્ડક્ટર્સ ફરે છે, ત્યારે 120 ° દ્વારા તબક્કામાં (સમયસર) સ્થાનાંતરિત કોઇલમાં EMF પ્રેરિત થાય છે. કોઇલના છેડા મશીનમાંથી દૂર કરવામાં આવે છે અને તેને સ્ટાર અથવા ડેલ્ટામાં જોડી શકાય છે.
જનરેટરમાં, ક્ષેત્ર અને વાહકની સંબંધિત ગતિ રોટરના વ્યાસ, સેકન્ડ દીઠ રોટરની ક્રાંતિની સંખ્યા અને ધ્રુવ જોડીની સંખ્યા દ્વારા નક્કી કરવામાં આવે છે.

જો જનરેટર પાણીના પ્રવાહ (હાઇડ્રોજનરેટર) દ્વારા ચલાવવામાં આવે છે, તો તે સામાન્ય રીતે ધીમી ક્રાંતિ સાથે બનાવવામાં આવે છે. ઇચ્છિત વર્તમાન આવર્તન મેળવવા માટે, ધ્રુવોની સંખ્યામાં વધારો કરવો જરૂરી છે, જે બદલામાં રોટરના વ્યાસમાં વધારો કરવાની જરૂર છે.
સંખ્યાબંધ તકનીકી કારણોસર શક્તિશાળી હાઇડ્રોજન જનરેટર તેમની પાસે સામાન્ય રીતે ઊભી શાફ્ટ હોય છે અને તે હાઇડ્રોલિક ટર્બાઇનની ઉપર સ્થિત હોય છે, જે તેમને ફેરવવાનું કારણ બને છે.

સ્ટીમ ટર્બાઇન ડ્રિવન જનરેટર — ટર્બાઇન જનરેટર સામાન્ય રીતે હાઇ સ્પીડ હોય છે. યાંત્રિક દળોને ઘટાડવા માટે, તેમની પાસે નાના વ્યાસ અને અનુરૂપ રીતે નાની સંખ્યામાં ધ્રુવો છે. સંખ્યાબંધ તકનીકી વિચારણાઓ માટે આડી શાફ્ટ સાથે ટર્બાઇન જનરેટરનું ઉત્પાદન જરૂરી છે.
જો જનરેટર આંતરિક કમ્બશન એન્જિન દ્વારા ચલાવવામાં આવે છે, તો તેને ડીઝલ જનરેટર કહેવામાં આવે છે, કારણ કે ડીઝલ એન્જિનનો ઉપયોગ સામાન્ય રીતે એન્જિન તરીકે થાય છે જે સસ્તા ઇંધણનો વપરાશ કરે છે.

જનરેટર રિવર્સિબિલિટી, સિંક્રનસ મોટર્સ
જો બાહ્ય સ્ત્રોતમાંથી જનરેટરના સ્ટેટર વિન્ડિંગ પર વૈકલ્પિક વોલ્ટેજ લાગુ કરવામાં આવે છે, તો સ્ટેટરમાં ઉત્પન્ન થતા વર્તમાનના ચુંબકીય ક્ષેત્ર સાથે ઇન્ડક્ટરના ધ્રુવોની ક્રિયાપ્રતિક્રિયા હશે, અને તે જ દિશામાંથી ટોર્ક કાર્ય કરશે. બધા ધ્રુવો પર.
જો રોટર એવી ઝડપે ફરે છે કે વૈકલ્પિક પ્રવાહના અડધા સમયગાળાના થોડા સમય પછી, ઇન્ડક્ટરનો આગળનો ધ્રુવ (પ્રથમ ધ્રુવની સાઇનથી વિરુદ્ધ) સ્ટેટર વિન્ડિંગના માનવામાં આવેલા વાયરની નીચે ફિટ થઈ જશે, તો પછી તેની નિશાની તે અને વર્તમાન વચ્ચેની ક્રિયાપ્રતિક્રિયા બળ, જેણે તેની દિશા બદલી છે, તે જ રહેશે.
આ પરિસ્થિતિઓ હેઠળ, રોટર, ટોર્કના સતત પ્રભાવ હેઠળ, ખસેડવાનું ચાલુ રાખશે અને કોઈપણ મિકેનિઝમને ચલાવવા માટે સક્ષમ હશે. રોટરની હિલચાલના પ્રતિકારને દૂર કરવું નેટવર્ક દ્વારા વપરાશમાં લેવાતી ઊર્જાને કારણે થશે, અને જનરેટર ઇલેક્ટ્રિક મોટર બની જશે.

જો કે, એ નોંધવું જોઈએ કે સતત ચળવળ માત્ર પરિભ્રમણની સખત રીતે વ્યાખ્યાયિત ગતિએ જ શક્ય છે, કારણ કે તેમાંથી વિચલનના કિસ્સામાં એક પ્રવેગક ક્ષણ રોટરના દરેક ધ્રુવો પર આંશિક રીતે કાર્ય કરશે, જે રોટરના બે વાહક વચ્ચે ફરશે. સ્ટેટર, સમયનો ભાગ - રોકવું.
આમ, મોટરના પરિભ્રમણની ગતિ સખત રીતે નિર્ધારિત થવી જોઈએ, - જે સમય દરમિયાન ધ્રુવને બીજા દ્વારા બદલવામાં આવે છે તે સમય વર્તમાનના અડધા સમયગાળા સાથે મેળ ખાતો હોવો જોઈએ, તેથી જ આવા મોટર્સને કહેવામાં આવે છે. સુમેળપૂર્વક.
જો સ્થિર રોટર સાથે સ્ટેટર વિન્ડિંગ પર વૈકલ્પિક વોલ્ટેજ લાગુ કરવામાં આવે છે, તો, જો કે, વર્તમાનના પ્રથમ અર્ધ-ચક્ર દરમિયાન રોટરના તમામ ધ્રુવો સમાન ચિહ્નના ટોર્કની ક્રિયાનો અનુભવ કરે છે, તેમ છતાં, જડતાને કારણે, રોટરને ખસેડવાનો સમય નથી. આગામી અર્ધ-ચક્રમાં, બધા રોટર ધ્રુવો માટેના ટોર્કની નિશાની વિરુદ્ધમાં બદલાશે.
પરિણામે, રોટર વાઇબ્રેટ થશે પરંતુ ફેરવી શકશે નહીં. તેથી, સિંક્રનસ મોટરને પહેલા ઘાયલ થવી જોઈએ, એટલે કે, ક્રાંતિની સામાન્ય સંખ્યામાં લાવવામાં આવે છે, અને તે પછી જ સ્ટેટર વિન્ડિંગમાં વર્તમાન ચાલુ થવો જોઈએ.
સિંક્રનસ મોટર્સનો વિકાસ યાંત્રિક પદ્ધતિઓ (ઓછી શક્તિઓ પર) અને વિશેષ વિદ્યુત ઉપકરણો (ઉચ્ચ શક્તિઓ પર) દ્વારા હાથ ધરવામાં આવે છે.
નાના લોડ ફેરફારો માટે, મોટરની ઝડપ નવા લોડને સ્વીકારવા માટે આપમેળે બદલાઈ જશે. તેથી, જેમ જેમ મોટર શાફ્ટ પરનો ભાર વધે છે, રોટર તરત જ ધીમો પડી જાય છે. તેથી, સ્ટેટર વિન્ડિંગમાં ઇન્ડક્ટર દ્વારા પ્રેરિત લાઇન વોલ્ટેજ અને વિપરીત પ્રેરિત EMF વચ્ચેનો તબક્કો બદલાય છે.
વધુમાં, આર્મેચર પ્રતિક્રિયા ઇન્ડક્ટર્સનું ડિમેગ્નેટાઇઝેશન બનાવે છે, તેથી સ્ટેટર કરંટ વધે છે, ઇન્ડક્ટર્સ વધેલા ટોર્કનો અનુભવ કરે છે, અને મોટર વધેલા ભારને વટાવીને ફરીથી સિંક્રનસ રીતે ફેરવવાનું શરૂ કરે છે. લોડ ઘટાડા સાથે સમાન પ્રક્રિયા થાય છે.
ભારમાં તીવ્ર વધઘટ સાથે, મોટરની આ અનુકૂલનક્ષમતા અપૂરતી હોઈ શકે છે, તેની ગતિ નોંધપાત્ર રીતે બદલાશે, તે "સિંક્રોનિઝમમાંથી બહાર આવશે" અને આખરે બંધ થઈ જશે, જ્યારે સ્ટેટરમાં પ્રેરિત ઇન્ડક્શન EMF અદૃશ્ય થઈ જાય છે, અને તેમાં વર્તમાન વધે છે. તીવ્રપણે તેથી, ભારમાં તીવ્ર વધઘટ ટાળવી આવશ્યક છે. મોટરને રોકવા માટે, દેખીતી રીતે તમારે પહેલા સ્ટેટર સર્કિટને ડિસ્કનેક્ટ કરવું પડશે અને પછી ચોક્સને ડિસ્કનેક્ટ કરવું પડશે; એન્જિન શરૂ કરતી વખતે, તમારે ઑપરેશનના વિપરીત ક્રમનું પાલન કરવું આવશ્યક છે.
સિંક્રનસ મોટર્સનો ઉપયોગ મોટાભાગે મિકેનિઝમ્સને ચલાવવા માટે થાય છે જે સતત ગતિએ કાર્ય કરે છે. અહીં સિંક્રનસ મોટર્સના ફાયદા અને ગેરફાયદા અને તેમને શરૂ કરવાની પદ્ધતિઓ છે: સિંક્રનસ મોટર્સ અને તેમની એપ્લિકેશનો
શૈક્ષણિક ફિલ્મ સ્ટ્રીપ - "સિંક્રોનસ મોટર્સ", જે 1966 માં શૈક્ષણિક-વિઝ્યુઅલ એડ્સ ફેક્ટરી દ્વારા બનાવવામાં આવી હતી. તમે તેને અહીં જોઈ શકો છો: ફિલ્મસ્ટ્રીપ "સિંક્રોનસ મોટર"
