ઇલેક્ટ્રિક ડ્રાઇવ્સની યાંત્રિક લાક્ષણિકતાઓ
 ઇલેક્ટ્રિક ડ્રાઇવની પસંદગી વર્ક મશીનની જરૂરિયાતો દ્વારા નક્કી કરવામાં આવે છે. ઇલેક્ટ્રિક ડ્રાઇવ એ સુનિશ્ચિત કરવું આવશ્યક છે કે કાર્યકારી મશીન તમામ સંભવિત સ્થિતિઓમાં ઉલ્લેખિત તકનીક કરે છે: લોડ શરૂ કરવું, પ્રાપ્ત કરવું અને ડિસ્ચાર્જ કરવું, બંધ કરવું, ઝડપ બદલવી, સતત લોડ. આ મોડ્સની પ્રકૃતિ મુખ્યત્વે એન્જિન અને વર્કિંગ મશીનના યાંત્રિક ગુણધર્મો દ્વારા નક્કી કરવામાં આવે છે... એન્જિન અને વર્કિંગ મશીન બંનેના યાંત્રિક ગુણધર્મોના મૂલ્યાંકન માટેના મુખ્ય માપદંડોમાંનો એક તેમની યાંત્રિક લાક્ષણિકતાઓ છે.
ઇલેક્ટ્રિક ડ્રાઇવની પસંદગી વર્ક મશીનની જરૂરિયાતો દ્વારા નક્કી કરવામાં આવે છે. ઇલેક્ટ્રિક ડ્રાઇવ એ સુનિશ્ચિત કરવું આવશ્યક છે કે કાર્યકારી મશીન તમામ સંભવિત સ્થિતિઓમાં ઉલ્લેખિત તકનીક કરે છે: લોડ શરૂ કરવું, પ્રાપ્ત કરવું અને ડિસ્ચાર્જ કરવું, બંધ કરવું, ઝડપ બદલવી, સતત લોડ. આ મોડ્સની પ્રકૃતિ મુખ્યત્વે એન્જિન અને વર્કિંગ મશીનના યાંત્રિક ગુણધર્મો દ્વારા નક્કી કરવામાં આવે છે... એન્જિન અને વર્કિંગ મશીન બંનેના યાંત્રિક ગુણધર્મોના મૂલ્યાંકન માટેના મુખ્ય માપદંડોમાંનો એક તેમની યાંત્રિક લાક્ષણિકતાઓ છે.
ઇલેક્ટ્રિક મોટર્સની યાંત્રિક લાક્ષણિકતાઓ
ઇલેક્ટ્રિક મોટરની યાંત્રિક લાક્ષણિકતા એ મોટર દ્વારા વિકસિત ટોર્ક પર શાફ્ટના પરિભ્રમણની ગતિની અવલંબન છે ω=φ(Md) અથવા n = e(Md) જ્યાં ω — શાફ્ટના પરિભ્રમણની કોણીય ગતિ, રેડ / સેકન્ડ, n — શાફ્ટ પરિભ્રમણની ઝડપ, rpm
મોટરની યાંત્રિક લાક્ષણિકતાને કુદરતી અવલંબન કહેવાય છે n = f (M) પાવર નેટવર્કના નજીવા પરિમાણો, સામાન્ય જોડાણ યોજના અને વિદ્યુત સર્કિટમાં વધારાના પ્રતિકાર વિના મેળવવામાં આવે છે.
જો ત્યાં વધારાના પ્રતિકાર હોય અથવા મોટરને નજીવા કરતાં અન્ય વોલ્ટેજ અથવા ફ્રીક્વન્સીવાળા નેટવર્કમાંથી ખવડાવવામાં આવે, તો મોટરની યાંત્રિક લાક્ષણિકતાઓને કૃત્રિમ કહેવામાં આવશે... દેખીતી રીતે, મોટરમાં અસંખ્ય કૃત્રિમ લાક્ષણિકતાઓ છે અને માત્ર એક કુદરતી.
મોટાભાગની ઇલેક્ટ્રિક મોટર્સ, લોડ હેઠળ, ટોર્ક વધવાથી ઝડપમાં ઘટાડો થાય છે. આ કિસ્સામાં લાક્ષણિકતાને ફોલિંગ કહેવામાં આવે છે... ટોર્કમાં ફેરફાર સાથે એન્જિનની ગતિમાં ફેરફારની ડિગ્રી યાંત્રિક લાક્ષણિકતાઓની કહેવાતી જડતા દ્વારા અંદાજવામાં આવે છે, જે ગુણોત્તર α = ΔM / Δω અથવા α = ΔM દ્વારા નક્કી કરવામાં આવે છે. / Δн
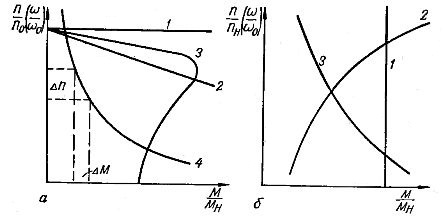
ચોખા. 1. વિવિધ પ્રકારની યાંત્રિક લાક્ષણિકતાઓ: a — ઇલેક્ટ્રિક મોટર્સ, b — ઉત્પાદન મશીનો.
ક્ષણમાં પરિવર્તનના મૂલ્યો અને જડતાના નિર્ધારણમાં ઘટાડો દર સામાન્ય રીતે સંબંધિત એકમોમાં લેવામાં આવે છે. આનાથી વિવિધ પ્રકારના એન્જિનની લાક્ષણિકતાઓની તુલના કરવાનું શક્ય બને છે.
કઠોરતાની ડિગ્રીના આધારે, એન્જિનની તમામ યાંત્રિક લાક્ષણિકતાઓ નીચેના જૂથોમાં વહેંચાયેલી છે.
1. જડતા મૂલ્ય સાથે સંપૂર્ણ ભારે પ્રદર્શન α = ∞… સિંક્રનસ મોટર્સમાં પરિભ્રમણની સખત સતત ગતિ સાથે આવી યાંત્રિક લાક્ષણિકતાઓ (વળાંક 1, ફિગ. 1, a) હોય છે.
2. વધતા ટોર્ક અને α = 40 — 10 સાથે ઝડપમાં પ્રમાણમાં નાના ઘટાડા સાથે નક્કર લાક્ષણિકતાઓ.આ જૂથમાં સ્વતંત્ર ઉત્તેજના (વળાંક 2) સાથે ડીસી મોટર્સની કુદરતી લાક્ષણિકતાઓ અને રેખીય વિભાગ (વળાંક 3) માં ઇન્ડક્શન મોટર્સની લાક્ષણિકતાઓ શામેલ છે.
3. વધતા ટોર્ક સાથે ઝડપમાં મોટા પ્રમાણમાં ઘટાડો અને α = 10 સુધીની જડતા સાથે નરમ યાંત્રિક લાક્ષણિકતાઓ. આવી લાક્ષણિકતાઓમાં શ્રેણી ઉત્તેજના (વળાંક 4) સાથે ડીસી મોટર્સ હોય છે, ઉચ્ચ આર્મેચર પ્રતિકાર સાથે સ્વતંત્ર રીતે ઉત્તેજિત મોટર્સ અને વધારાના પ્રતિકાર સાથે અસુમેળ મોટર્સ હોય છે. રોટર સર્કિટમાં.
ઇલેક્ટ્રિક ડ્રાઇવના સંચાલન દરમિયાન, કાર્યકારી મશીનના પ્રતિકારને દૂર કરવા માટે, મોટરને ચોક્કસ ક્ષણ વિકસાવવી આવશ્યક છે. તેથી, એન્જિન પસંદ કરતી વખતે, એન્જિન અને કાર્યકારી મશીનની લાક્ષણિકતાઓના પત્રવ્યવહારને ઓળખવા માટે સૌ પ્રથમ જરૂરી છે.

કાર્યકારી મશીનોની યાંત્રિક લાક્ષણિકતાઓ
વર્કિંગ મશીનની યાંત્રિક લાક્ષણિકતા એ ડ્રાઇવ શાફ્ટના પરિભ્રમણની ગતિ પર મશીનના સ્થિર પ્રતિકારની ક્ષણની અવલંબન છે. સંયુક્ત બાંધકામની સગવડતા માટે, આ અવલંબન સામાન્ય રીતે મોટર લાક્ષણિકતાની જેમ જ ω=φ(Ms -Ms) અથવા n =e(Miss) સ્વરૂપે વ્યક્ત કરવામાં આવે છે.
સ્થિર પ્રતિકારની ક્ષણ Ms, અથવા ટૂંકા માટે સ્થિર ક્ષણ, જ્યારે ગતિ બદલાતી નથી ત્યારે સ્થિર (સ્થિર) મોડમાં ડ્રાઇવ શાફ્ટ પર મશીન દ્વારા બનાવેલ પ્રતિકારની ક્ષણ છે.
જો કાઇનેમેટિક સ્કીમના તત્વો પર સ્થિર દળો અથવા ક્ષણોનું વિતરણ જાણીતું હોય તો મશીનની યાંત્રિક લાક્ષણિકતાઓ પ્રયોગમૂલક રીતે અથવા ગણતરી દ્વારા મેળવી શકાય છે.મશીનોની સ્થિર ક્ષણો માત્ર ઝડપ પર જ નહીં, પણ અન્ય જથ્થા પર પણ આધાર રાખે છે, તેથી, ઇલેક્ટ્રિક ડ્રાઇવ્સની વ્યવહારિક ગણતરીમાં, દરેક કેસને અલગથી ધ્યાનમાં લેવો જરૂરી છે.
વિવિધ કાર્યકારી મશીનોની સ્થિર ક્ષણોને તેમની ગતિ અવલંબન (યાંત્રિક લાક્ષણિકતાઓ) ની પ્રકૃતિ અનુસાર જૂથોમાં વહેંચવામાં આવે છે. વ્યવહારમાં સૌથી સામાન્ય નીચે મુજબ છે.
1. સ્થિર ક્ષણ થોડો આધાર રાખે છે અથવા વ્યવહારીક રીતે ઝડપ પર આધારિત નથી (વળાંક 1, ફિગ. 2, b). આવી લાક્ષણિકતાઓમાં લિફ્ટિંગ મિકેનિઝમ્સ, ક્રેન્સ, વિન્ચ, હોઇસ્ટ્સ તેમજ સતત લોડ હેઠળ બેલ્ટ કન્વેયર્સ હોય છે.
2. મશીનની સ્થિર ક્ષણ ઝડપના ચોરસ (વળાંક 2) ના પ્રમાણમાં વધે છે. આ લાક્ષણિકતા, અક્ષીય ચાહકોની લાક્ષણિકતા, તેને ચાહકની લાક્ષણિકતા કહેવામાં આવે છે અને વિશ્લેષણાત્મક રીતે સૂત્રના સ્વરૂપમાં રજૂ કરવામાં આવે છે: Mc = Mo + kn2, જ્યાં Mo એ પ્રારંભિક સ્થિર ક્ષણ છે, મોટેભાગે ઘર્ષણ બળને કારણે, જે સામાન્ય રીતે નથી. ઝડપ પર આધાર રાખે છે, k પ્રાયોગિક ગુણાંક છે. પંખા ઉપરાંત સેન્ટ્રીફ્યુગલ અને વોર્ટેક્સ પંપ, સેપરેટર્સ, સેન્ટ્રીફ્યુજીસ, પ્રોપેલર્સ, ટર્બોચાર્જર અને ફરતા ડ્રમ આઈડલરમાં ચાહકની વિશેષતાઓ હોય છે.
3. વધતી ઝડપ સાથે સ્થિર ક્ષણ ઘટે છે (વળાંક 3). આ જૂથમાં કેટલાક કન્વેયર મિકેનિઝમ્સ અને કેટલાક મેટલ કટીંગ મશીનોની લાક્ષણિકતાઓનો સમાવેશ થાય છે.
4. સ્થિર ક્ષણ ઝડપ સાથે અસ્પષ્ટપણે બદલાય છે, તકનીકી પ્રક્રિયાની વિશિષ્ટતાને કારણે તીવ્ર સંક્રમણ સાથે. આ જૂથની લાક્ષણિકતાઓમાં એવા મશીનો છે જે વારંવાર મોટા ઓવરલોડ સાથે કામ કરે છે, જે ક્યારેક સંપૂર્ણ સ્ટોપ તરફ દોરી જાય છે.ઉદાહરણ તરીકે, સિંગલ-બકેટ એક્સેવેટર, સ્ક્રેપર કન્વેયર માટે સ્કૂપિંગ મિકેનિઝમ, ટ્રાન્સપોર્ટેડ માસ, ક્રશર અને અન્ય મશીનોને અવરોધિત કરવા હેઠળ કામ કરે છે.
સૂચિબદ્ધ લોકો ઉપરાંત, વ્યવહારમાં મશીનોની અન્ય પ્રકારની યાંત્રિક લાક્ષણિકતાઓ છે, ઉદાહરણ તરીકે, પિસ્ટન પંપ અને કોમ્પ્રેસર, જેની સ્થિર ક્ષણો પાથ પર આધારિત છે.