આવર્તન સાથે પંપ એકમોની ઇલેક્ટ્રિક ડ્રાઇવ
 સેન્ટ્રીફ્યુગલ પંપના ઓપરેટિંગ મોડ્સ તેમના વ્હીલ્સની રોટેશન સ્પીડને બદલીને એડજસ્ટ કરવા માટે સૌથી વધુ ઉર્જા કાર્યક્ષમ છે. જો એડજસ્ટેબલ ઇલેક્ટ્રિક ડ્રાઇવનો ડ્રાઇવ મોટર તરીકે ઉપયોગ કરવામાં આવે તો વ્હીલ્સના પરિભ્રમણની ગતિ બદલી શકાય છે.
સેન્ટ્રીફ્યુગલ પંપના ઓપરેટિંગ મોડ્સ તેમના વ્હીલ્સની રોટેશન સ્પીડને બદલીને એડજસ્ટ કરવા માટે સૌથી વધુ ઉર્જા કાર્યક્ષમ છે. જો એડજસ્ટેબલ ઇલેક્ટ્રિક ડ્રાઇવનો ડ્રાઇવ મોટર તરીકે ઉપયોગ કરવામાં આવે તો વ્હીલ્સના પરિભ્રમણની ગતિ બદલી શકાય છે.
ગેસ ટર્બાઇન અને આંતરિક કમ્બશન એન્જિનની ડિઝાઇન અને લાક્ષણિકતાઓ એવી છે કે તેઓ જરૂરી શ્રેણીમાં રોટેશનલ સ્પીડમાં ફેરફાર પ્રદાન કરી શકે છે.
દરેક મિકેનિઝમની પરિભ્રમણ ગતિને સમાયોજિત કરવાની પ્રક્રિયાનું ઉપકરણની યાંત્રિક લાક્ષણિકતાઓનો ઉપયોગ કરીને સરળતાથી વિશ્લેષણ કરવામાં આવે છે.
પંપ અને ઇલેક્ટ્રિક મોટર ધરાવતા પમ્પિંગ યુનિટની યાંત્રિક લાક્ષણિકતાઓને ધ્યાનમાં લો. અંજીરમાં. 1 ચેક વાલ્વ (વળાંક 1) અને ખિસકોલી-કેજ રોટર (વળાંક 2) સાથે ઇલેક્ટ્રિક મોટરથી સજ્જ સેન્ટ્રીફ્યુગલ પંપની યાંત્રિક લાક્ષણિકતાઓ દર્શાવે છે.
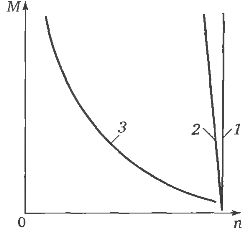
ચોખા. 1. પંમ્પિંગ યુનિટની યાંત્રિક લાક્ષણિકતાઓ
ઇલેક્ટ્રિક મોટરના ટોર્ક મૂલ્યો અને પંપના પ્રતિકારક ટોર્ક વચ્ચેના તફાવતને ગતિશીલ ટોર્ક કહેવામાં આવે છે.જો મોટરનો ટોર્ક પંપના પ્રતિકારની ક્ષણ કરતા વધારે હોય, તો ગતિશીલ ટોર્કને હકારાત્મક ગણવામાં આવે છે, જો તે ઓછું હોય, તો તે નકારાત્મક છે.
હકારાત્મક ગતિશીલ ક્ષણના પ્રભાવ હેઠળ, પંપ એકમ પ્રવેગક સાથે કામ કરવાનું શરૂ કરે છે, એટલે કે. વેગ આપે છે. જો ગતિશીલ ટોર્ક નકારાત્મક હોય, તો પંપ એકમ વિલંબ સાથે કાર્ય કરે છે, એટલે કે. ધીમો પડી જાય છે.
જ્યારે આ ક્ષણો સમાન હોય છે, ત્યારે ઓપરેશનનો સ્થિર મોડ થાય છે, એટલે કે. પંપ એકમ સતત ગતિએ કાર્ય કરે છે. આ ઝડપ અને અનુરૂપ ટોર્ક ઇલેક્ટ્રિક મોટર અને પંપની યાંત્રિક લાક્ષણિકતાઓના આંતરછેદ દ્વારા નક્કી કરવામાં આવે છે (ફિગ. 1 માં બિંદુ a).
જો એક અથવા બીજી રીતે ગોઠવણની પ્રક્રિયામાં યાંત્રિક લાક્ષણિકતા બદલાય છે, ઉદાહરણ તરીકે, ઇલેક્ટ્રિક મોટરના રોટર સર્કિટ (ફિગ. 1 માં વળાંક 3) માં વધારાના રેઝિસ્ટરને રજૂ કરીને નરમ બનવા માટે, ઇલેક્ટ્રિક મોટરનો ટોર્ક પ્રતિકારની ક્ષણથી નાની થઈ જશે.
નકારાત્મક ગતિશીલ ટોર્કના પ્રભાવ હેઠળ, પંપ એકમ વિલંબ સાથે કામ કરવાનું શરૂ કરે છે, એટલે કે. ટોર્ક અને પ્રતિકાર ક્ષણ ફરીથી સંતુલિત થાય ત્યાં સુધી ધીમો પડી જાય છે (ફિગ. 1 માં બિંદુ b). આ બિંદુ ઝડપ અને ટોર્કના ઇજનવેલ્યુને અનુરૂપ છે.
આમ, પંમ્પિંગ યુનિટના પરિભ્રમણની ગતિને નિયંત્રિત કરવાની પ્રક્રિયા સતત ઇલેક્ટ્રિક મોટરના ટોર્ક અને પંપના પ્રતિકારની ક્ષણમાં ફેરફાર સાથે છે.
પંપની ગતિનું નિયંત્રણ કાં તો ઇલેક્ટ્રિક મોટરની ઝડપને બદલીને કરી શકાય છે, જે પંપ સાથે સખત રીતે જોડાયેલ છે, અથવા પંપને ઇલેક્ટ્રિક મોટર સાથે જોડતા ટ્રાન્સમિશનના ગિયર રેશિયોને બદલીને, જે સતત ગતિએ ચાલે છે.

ઇલેક્ટ્રિક મોટર્સના પરિભ્રમણની ગતિનું નિયમન
એસી મોટર્સનો ઉપયોગ મુખ્યત્વે પંમ્પિંગ યુનિટમાં થાય છે. AC મોટરની રોટેશનલ સ્પીડ સપ્લાય કરંટ f, ધ્રુવ જોડી p અને સ્લિપ s ની સંખ્યા પર આધાર રાખે છે. આમાંના એક અથવા વધુ પરિમાણોને બદલીને, તમે ઇલેક્ટ્રિક મોટર અને તેની સાથે જોડાયેલા પંપની ઝડપ બદલી શકો છો.
ફ્રીક્વન્સી ઇલેક્ટ્રિક ડ્રાઇવનું મુખ્ય તત્વ છે આવર્તન કન્વર્ટર… ઇન્વર્ટર ચલ e2 માં રૂપાંતરિત સ્થિર ગ્રીડ આવર્તન f1 ધરાવે છે. આવર્તન e2 ના પ્રમાણસર કન્વર્ટરના આઉટપુટ સાથે જોડાયેલ ઇલેક્ટ્રિક મોટરની ગતિમાં ફેરફાર કરે છે.
ફ્રીક્વન્સી કન્વર્ટર સાથે, મુખ્ય વોલ્ટેજ U1 અને આવર્તન વ્યવહારીક રીતે f1 ને કન્ટ્રોલ સિસ્ટમ માટે જરૂરી U2 અને e2 ચલ પરિમાણોમાં રૂપાંતરિત કરતા નથી. ઇલેક્ટ્રિક મોટરના સ્થિર સંચાલનને સુનિશ્ચિત કરવા, વર્તમાન અને ચુંબકીય પ્રવાહની દ્રષ્ટિએ તેના ઓવરલોડને મર્યાદિત કરવા, ફ્રીક્વન્સી કન્વર્ટરમાં ઉચ્ચ ઉર્જા સૂચકાંકો જાળવવા માટે, તેના ઇનપુટ અને આઉટપુટ પરિમાણો વચ્ચેનો ચોક્કસ ગુણોત્તર તેના પ્રકાર પર આધાર રાખીને જાળવવો આવશ્યક છે. યાંત્રિક પંપ લાક્ષણિકતાઓ. આ સંબંધો ફ્રિક્વન્સી કંટ્રોલ લો સમીકરણમાંથી લેવામાં આવ્યા છે.
પંપ માટે, ગુણોત્તર અવલોકન કરવું આવશ્યક છે:
U1 / f1 = U2 / f2 = const
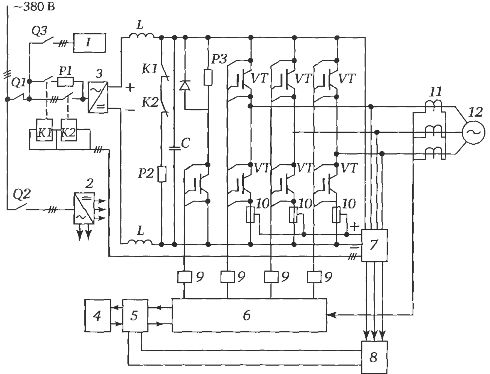
અંજીરમાં. 2 આવર્તન નિયમન સાથે ઇન્ડક્શન મોટરની યાંત્રિક લાક્ષણિકતાઓ દર્શાવે છે.જેમ જેમ આવર્તન f2 ઘટે છે તેમ, યાંત્રિક લાક્ષણિકતા માત્ર n — M કોઓર્ડિનેટ્સમાં તેની સ્થિતિને બદલે છે, પરંતુ અમુક અંશે તેનો આકાર પણ બદલે છે. ખાસ કરીને, ઇલેક્ટ્રિક મોટરના મહત્તમ ટોર્કમાં ઘટાડો થાય છે. આ એ હકીકતને કારણે છે કે U1 / f1 = U2 / f2 = const ના ગુણોત્તર સાથે અને આવર્તન f1 માં ફેરફાર મોટર ટોર્કની તીવ્રતા પર સ્ટેટરના સક્રિય પ્રતિકારની અસરને ધ્યાનમાં લેતા નથી.

ચોખા. 2. મહત્તમ (1) અને ઘટાડેલી (2) ફ્રીક્વન્સી પર આવર્તન ઇલેક્ટ્રિક ડ્રાઇવની યાંત્રિક લાક્ષણિકતાઓ
આવર્તનને સમાયોજિત કરતી વખતે, આ પ્રભાવને ધ્યાનમાં લેતા, મહત્તમ ટોર્ક યથાવત રહે છે, યાંત્રિક લાક્ષણિકતાનો આકાર સચવાય છે, ફક્ત તેની સ્થિતિ બદલાય છે.
સાથે ફ્રીક્વન્સી કન્વર્ટર પલ્સ પહોળાઈ મોડ્યુલેશન (PWM) એ હકીકતને કારણે ઉચ્ચ ઉર્જા લાક્ષણિકતાઓ ધરાવે છે કે સિનુસોઇડલની નજીક આવતા વર્તમાન અને વોલ્ટેજ વળાંકોનો આકાર કન્વર્ટરના આઉટપુટ પર પ્રદાન કરવામાં આવે છે. તાજેતરમાં, IGBT મોડ્યુલ્સ (ઇન્સ્યુલેટેડ ગેટ બાયપોલર ટ્રાન્ઝિસ્ટર) પર આધારિત ફ્રીક્વન્સી કન્વર્ટર સૌથી વધુ વ્યાપક છે.
IGBT મોડ્યુલ એ ઉચ્ચ કાર્યક્ષમતા કી ઘટક છે. તેમાં લો વોલ્ટેજ ડ્રોપ, હાઈ સ્પીડ અને લો સ્વિચિંગ પાવર છે. અસુમેળ મોટરને નિયંત્રિત કરવા માટે PWM અને વેક્ટર અલ્ગોરિધમ સાથે IGBT મોડ્યુલો પર આધારિત ફ્રીક્વન્સી કન્વર્ટર અન્ય પ્રકારના કન્વર્ટર કરતાં ફાયદા ધરાવે છે. તે સમગ્ર આઉટપુટ આવર્તન શ્રેણી પર ઉચ્ચ પાવર પરિબળ ધરાવે છે.
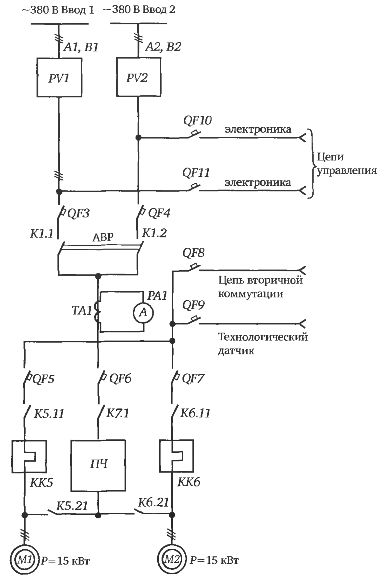
કન્વર્ટરની યોજનાકીય રેખાકૃતિ ફિગમાં બતાવવામાં આવી છે. 3.
ચોખા. 3.IGBT મોડ્યુલોના ફ્રીક્વન્સી કન્વર્ટરની યોજના: 1 — ચાહકોનો બ્લોક; 2 - વીજ પુરવઠો; 3 - અનિયંત્રિત રેક્ટિફાયર; 4 - નિયંત્રણ પેનલ; 5 - નિયંત્રણ પેનલ બોર્ડ; 6 — PWM; 7 — વોલ્ટેજ કન્વર્ઝન યુનિટ; 8 - સિસ્ટમ નિયંત્રણ બોર્ડ; 9 - ડ્રાઇવરો; 10 - ઇન્વર્ટર એકમ માટે ફ્યુઝ; 11 - વર્તમાન સેન્સર્સ; 12 — અસુમેળ ખિસકોલી-કેજ મોટર; Q1, Q2, Q3 — પાવર સર્કિટ, કંટ્રોલ સર્કિટ અને ફેન યુનિટ માટે સ્વિચ; K1, K2 - કેપેસિટર્સ અને પાવર સર્કિટ ચાર્જ કરવા માટે સંપર્કકર્તા; સી - કેપેસિટર બેંક; Rl, R2, R3 — કેપેસિટર ચાર્જના વર્તમાનને મર્યાદિત કરવા માટે રેઝિસ્ટર, કેપેસિટરના ડિસ્ચાર્જ અને ડ્રેઇન બ્લોક; VT - ઇન્વર્ટર પાવર સ્વિચ (IGBT મોડ્યુલ્સ)
ફ્રીક્વન્સી કન્વર્ટરના આઉટપુટ પર, એક વોલ્ટેજ (વર્તમાન) વળાંક રચાય છે, જે સાઇનસૉઇડથી સહેજ અલગ હોય છે, જેમાં ઉચ્ચ હાર્મોનિક ઘટકો હોય છે. તેમની હાજરી ઇલેક્ટ્રિક મોટરમાં નુકસાનમાં વધારો તરફ દોરી જાય છે. આ કારણોસર, જ્યારે ઇલેક્ટ્રિક ડ્રાઇવ રેટ કરેલ ગતિની નજીકની ઝડપે ચાલે છે, ત્યારે ઇલેક્ટ્રિક મોટર ઓવરલોડ થાય છે.
ઓછી ઝડપે કામ કરતી વખતે, પંપ ડ્રાઇવમાં વપરાતી સ્વ-વેન્ટિલેટેડ ઇલેક્ટ્રિક મોટર્સની ઠંડકની સ્થિતિ બગડે છે. પમ્પિંગ એકમોની સામાન્ય નિયંત્રણ શ્રેણી (1: 2 અથવા 1: 3), વેન્ટિલેશનની સ્થિતિના આ બગાડને પ્રવાહ દર અને પંપ હેડમાં ઘટાડો થવાને કારણે ભારમાં નોંધપાત્ર ઘટાડો દ્વારા વળતર આપવામાં આવે છે.
નજીવા મૂલ્ય (50 હર્ટ્ઝ) ની નજીકની ફ્રીક્વન્સીઝ પર કામ કરતી વખતે, ઉચ્ચ ક્રમના હાર્મોનિક્સના દેખાવ સાથે સંયોજનમાં ઠંડકની સ્થિતિના બગાડ માટે અનુમતિપાત્ર યાંત્રિક શક્તિમાં 8-15% ઘટાડો જરૂરી છે.આને કારણે, ઇલેક્ટ્રિક મોટરનો મહત્તમ ટોર્ક 1 — 2%, તેની કાર્યક્ષમતા — 1 — 4%, cosφ — 5-7% જેટલો ઘટાડો થાય છે.
ઇલેક્ટ્રિક મોટરને ઓવરલોડ કરવાનું ટાળવા માટે, તેની ગતિના ઉપલા મૂલ્યને મર્યાદિત કરવા અથવા ડ્રાઇવને વધુ શક્તિશાળી ઇલેક્ટ્રિક મોટરથી સજ્જ કરવું જરૂરી છે. જ્યારે પંમ્પિંગ યુનિટ આવર્તન e2> 50 Hz પર કામ કરવા માટે રચાયેલ હોય ત્યારે છેલ્લું માપ ફરજિયાત છે. એન્જિન રિવોલ્યુશનના ઉપલા મૂલ્યને મર્યાદિત કરવાનું આવર્તન e2 ને 48 હર્ટ્ઝ સુધી મર્યાદિત કરીને કરવામાં આવે છે. ડ્રાઇવ મોટરની રેટેડ પાવરમાં વધારો નજીકના માનક મૂલ્ય સુધી ગોળાકાર છે.

વેરિયેબલ ઇલેક્ટ્રિક બ્લોક ડ્રાઇવ્સનું જૂથ નિયંત્રણ
ઘણા પંપ સેટમાં ઘણા બ્લોક હોય છે. એક નિયમ તરીકે, બધા એકમો એડજસ્ટેબલ ઇલેક્ટ્રિક ડ્રાઇવથી સજ્જ નથી. બે અથવા ત્રણ ઇન્સ્ટોલ કરેલા એકમોમાંથી, તે એકને એડજસ્ટેબલ ઇલેક્ટ્રિક ડ્રાઇવથી સજ્જ કરવા માટે પૂરતું છે. જો કન્વર્ટર કાયમી ધોરણે એકમમાંથી એક સાથે જોડાયેલ હોય, તો તેમના મોટર સંસાધનનો અસમાન વપરાશ થાય છે, કારણ કે વેરિયેબલ સ્પીડ ડ્રાઇવથી સજ્જ એકમનો ઉપયોગ લાંબા સમય સુધી થાય છે.
સ્ટેશન પર સ્થાપિત તમામ બ્લોક વચ્ચે લોડના સમાન વિતરણ માટે, જૂથ નિયંત્રણ સ્ટેશનો વિકસાવવામાં આવ્યા છે, જેની મદદથી બ્લોક્સને કન્વર્ટર સાથે શ્રેણીમાં જોડી શકાય છે. નિયંત્રણ સ્ટેશનો સામાન્ય રીતે ઓછા વોલ્ટેજ એકમો (380 V) માટે બનાવવામાં આવે છે.
સામાન્ય રીતે, નીચા વોલ્ટેજ નિયંત્રણ સ્ટેશનો બે અથવા ત્રણ એકમોને નિયંત્રિત કરવા માટે રચાયેલ છે.લો-વોલ્ટેજ કંટ્રોલ સ્ટેશનમાં સર્કિટ બ્રેકર્સનો સમાવેશ થાય છે જે ફેઝ-ફેઝ શોર્ટ સર્કિટ અને ગ્રાઉન્ડિંગ સામે રક્ષણ પૂરું પાડે છે, ઉપકરણોને ઓવરલોડથી બચાવવા માટે થર્મલ રિલે, તેમજ નિયંત્રણ સાધનો (સ્વીચો, બટન પોસ્ટ્સ અને અન્ય.).
કંટ્રોલ સ્ટેશનના સ્વિચિંગ સર્કિટમાં જરૂરી ઇન્ટરલૉક્સ હોય છે જે ફ્રીક્વન્સી કન્વર્ટરને કોઈપણ પસંદ કરેલા બ્લોક સાથે કનેક્ટ કરવાની અને પમ્પિંગ અથવા બ્લોઇંગ યુનિટના ઑપરેશનના તકનીકી મોડને ખલેલ પહોંચાડ્યા વિના કાર્યકારી બ્લોક્સને બદલવાની મંજૂરી આપે છે.
કંટ્રોલ સ્ટેશન, નિયમ પ્રમાણે, પાવર એલિમેન્ટ્સ (ઓટોમેટિક સ્વીચો, કોન્ટેક્ટર્સ વગેરે) સાથે કન્ટ્રોલ અને રેગ્યુલેટીંગ ડિવાઇસ (માઈક્રોપ્રોસેસર કંટ્રોલર્સ વગેરે) ધરાવે છે.
ગ્રાહકની વિનંતી પર, સ્ટેશનો બેકઅપ પાવર (ATS) ના સ્વચાલિત સ્વિચિંગ, વપરાશ કરેલ વીજળીનું વ્યાવસાયિક માપન, શટડાઉન સાધનોના નિયંત્રણ માટે ઉપકરણોથી સજ્જ છે.
જો જરૂરી હોય તો, વધારાના ઉપકરણો કંટ્રોલ સ્ટેશનમાં દાખલ કરવામાં આવે છે, જે એકમોના સોફ્ટ સ્ટાર્ટરના ફ્રીક્વન્સી કન્વર્ટર સાથે ઉપયોગની ખાતરી કરે છે.
સ્વચાલિત નિયંત્રણ સ્ટેશનો પ્રદાન કરે છે:
-
તકનીકી પરિમાણ (દબાણ, સ્તર, તાપમાન, વગેરે) ના સેટ મૂલ્યને જાળવવું;
-
નિયમનકારી અને બિન-નિયમનિત એકમોના ઇલેક્ટ્રિક મોટર્સના ઓપરેટિંગ મોડ્સનું નિયંત્રણ (વપરાતું વર્તમાન, પાવરનું નિયંત્રણ) અને તેમનું રક્ષણ;
-
મુખ્ય ઉપકરણની નિષ્ફળતાના કિસ્સામાં બેકઅપ ઉપકરણની સ્વચાલિત શરૂઆત;
-
ફ્રીક્વન્સી કન્વર્ટરની નિષ્ફળતાના કિસ્સામાં બ્લોક્સને સીધા નેટવર્ક પર સ્વિચ કરવું;
-
બેકઅપ (ATS) ઇલેક્ટ્રિકલ ઇનપુટનું સ્વચાલિત સ્વિચિંગ;
-
પાવર સપ્લાય નેટવર્કમાં ખોટ અને ડીપ વોલ્ટેજ ડ્રોપ પછી સ્ટેશનનું ઓટોમેટિક રીકનેક્શન (AR);
-
આપેલ સમયે કાર્યકારી એકમોને રોકવા અને શરૂ કરવા સાથે સ્ટેશનના ઓપરેશન મોડમાં સ્વચાલિત ફેરફાર;
-
વધારાના અનિયંત્રિત એકમનું સ્વચાલિત સક્રિયકરણ જો નિયંત્રિત એકમ, નજીવી ઝડપે પહોંચે, જરૂરી પાણી પુરવઠો પ્રદાન કરતું ન હોય;
-
મોટર સંસાધનોનો એકસમાન વપરાશ સુનિશ્ચિત કરવા માટે ચોક્કસ અંતરાલો પર કામના બ્લોક્સનું સ્વચાલિત ફેરબદલ;
-
કંટ્રોલ પેનલ અથવા કંટ્રોલ પેનલમાંથી પમ્પિંગ (બ્લોઇંગ) યુનિટના ઓપરેશન મોડનું ઓપરેશનલ કંટ્રોલ.
ચોખા. 4. વેરિયેબલ ફ્રીક્વન્સી પંપની ઇલેક્ટ્રિક ડ્રાઇવ્સના જૂથ નિયંત્રણ માટેનું સ્ટેશન
પંમ્પિંગ એકમોમાં ચલ આવર્તનનો ઉપયોગ કરવાની કાર્યક્ષમતા
વેરિયેબલ ફ્રીક્વન્સી ડ્રાઇવનો ઉપયોગ તમને ઊર્જાને નોંધપાત્ર રીતે બચાવવા માટે પરવાનગી આપે છે, કારણ કે તે નીચા પ્રવાહ દરે મોટા પમ્પિંગ એકમોનો ઉપયોગ કરવાનું શક્ય બનાવે છે. આનો આભાર, એકમોની એકમની ક્ષમતામાં વધારો કરીને, તેમની કુલ સંખ્યા ઘટાડવા અને તે મુજબ, ઇમારતોના એકંદર પરિમાણોને ઘટાડવા, સ્ટેશનની હાઇડ્રોલિક યોજનાને સરળ બનાવવા અને પાઇપલાઇનની સંખ્યા ઘટાડવાનું શક્ય છે. વાલ્વ
આમ, પંમ્પિંગ એકમોમાં એડજસ્ટેબલ ઇલેક્ટ્રિક ડ્રાઇવનો ઉપયોગ, વીજળી અને પાણીની બચત સાથે, પમ્પિંગ એકમોની સંખ્યા ઘટાડવા, સ્ટેશનના હાઇડ્રોલિક સર્કિટને સરળ બનાવવા અને પમ્પિંગ સ્ટેશનના બિલ્ડિંગના બાંધકામના જથ્થાને ઘટાડવા માટે પરવાનગી આપે છે.આ જોડાણમાં, ગૌણ આર્થિક અસરો ઊભી થાય છે: બિલ્ડિંગના હીટિંગ, લાઇટિંગ અને સમારકામના ખર્ચમાં ઘટાડો થાય છે, સ્ટેશનોના હેતુ અને અન્ય ચોક્કસ પરિસ્થિતિઓના આધારે ઘટાડેલા ખર્ચમાં 20-50% ઘટાડો થઈ શકે છે.
ફ્રીક્વન્સી કન્વર્ટર્સ માટેના તકનીકી દસ્તાવેજો દર્શાવે છે કે પંમ્પિંગ એકમોમાં એડજસ્ટેબલ ઇલેક્ટ્રિક ડ્રાઇવનો ઉપયોગ તમને સ્વચ્છ અને ગંદા પાણીને પંમ્પ કરવા માટે ખર્ચવામાં આવતી ઊર્જાના 50% સુધી બચાવવા માટે પરવાનગી આપે છે, અને વળતરનો સમયગાળો ત્રણથી નવ મહિનાનો છે.
તે જ સમયે, ઓપરેટિંગ પંપ એકમોમાં નિયંત્રિત ઇલેક્ટ્રિક ડ્રાઇવની અસરકારકતાની ગણતરીઓ અને વિશ્લેષણ દર્શાવે છે કે 75 કેડબલ્યુ સુધીની શક્તિવાળા એકમોવાળા નાના પંપ એકમો માટે, ખાસ કરીને જ્યારે તેઓ મોટા સ્થિર દબાણ ઘટક સાથે કામ કરે છે, ત્યારે તે બહાર આવ્યું છે. નિયંત્રિત ઇલેક્ટ્રિક ડ્રાઇવ્સનો ઉપયોગ કરવા માટે યોગ્ય નથી. આ કિસ્સાઓમાં, તમે થ્રોટલિંગનો ઉપયોગ કરીને, કાર્યકારી પંપ એકમોની સંખ્યા બદલીને સરળ નિયંત્રણ સિસ્ટમોનો ઉપયોગ કરી શકો છો.
પંપ યુનિટ ઓટોમેશન સિસ્ટમ્સમાં વેરિયેબલ ઇલેક્ટ્રિક ડ્રાઇવનો ઉપયોગ, એક તરફ, ઊર્જા વપરાશ ઘટાડે છે, અને બીજી બાજુ, વધારાના મૂડી ખર્ચની જરૂર છે, તેથી પંપ એકમોમાં વેરિયેબલ ઇલેક્ટ્રિક ડ્રાઇવનો ઉપયોગ કરવાની શક્યતા ઘટાડેલા ખર્ચની તુલના કરીને નક્કી કરવામાં આવે છે. બે વિકલ્પોમાંથી: મૂળભૂત અને નવું. એડજસ્ટેબલ ઇલેક્ટ્રિક ડ્રાઇવથી સજ્જ પમ્પિંગ યુનિટને નવા વિકલ્પ તરીકે લેવામાં આવે છે, અને એક એકમ કે જેના એકમો સતત ગતિએ કાર્ય કરે છે તેને મુખ્ય તરીકે લેવામાં આવે છે.