કન્વેયર ડ્રાઇવ સાંકળો
 લેખ કેટલાક કન્વેયર્સની ઇલેક્ટ્રિકલ ડ્રાઇવ યોજનાઓની તપાસ કરે છે. અંજીરમાં. 1 વ્યક્તિગત કન્વેયર લાઇનની ઇલેક્ટ્રિક ડ્રાઇવનું યોજનાકીય આકૃતિ બતાવે છે, જેની ગતિ સખત સમાન હોવી જોઈએ. સતત ઉત્પાદનમાં આવી જરૂરિયાત ઊભી થાય છે, જ્યારે વિવિધ ઉત્પાદનો, અલગ લાઇન પર જરૂરી તકનીકી કામગીરી પછી, એકબીજા સાથે સખત અનુરૂપ એસેમ્બલી સાઇટ પર મળવું આવશ્યક છે.
લેખ કેટલાક કન્વેયર્સની ઇલેક્ટ્રિકલ ડ્રાઇવ યોજનાઓની તપાસ કરે છે. અંજીરમાં. 1 વ્યક્તિગત કન્વેયર લાઇનની ઇલેક્ટ્રિક ડ્રાઇવનું યોજનાકીય આકૃતિ બતાવે છે, જેની ગતિ સખત સમાન હોવી જોઈએ. સતત ઉત્પાદનમાં આવી જરૂરિયાત ઊભી થાય છે, જ્યારે વિવિધ ઉત્પાદનો, અલગ લાઇન પર જરૂરી તકનીકી કામગીરી પછી, એકબીજા સાથે સખત અનુરૂપ એસેમ્બલી સાઇટ પર મળવું આવશ્યક છે.
આ યોજના તમને એકસાથે અનેક કન્વેયર લાઈનો શરૂ કરવા અને રોકવા અને તેમની ઝડપને સમાયોજિત કરવાની મંજૂરી આપે છે. સામાન્ય ઇન્વર્ટર ફ્રીક્વન્સી કન્વર્ટર સાથે સિંક્રનસ શાફ્ટ સ્કીમ અનુસાર મોટર્સને સ્વિચ કરીને સંકલિત ચળવળ પ્રાપ્ત થાય છે. મોટર્સ D1 અને D2 નું સ્પીડ કંટ્રોલ વેરિયેબલ રેશિયો ગિયરબોક્સ P નો ઉપયોગ કરીને ઇન્વર્ટરની ઝડપ બદલીને કરવામાં આવે છે.
કન્વેયર શરૂ કરવાની પરવાનગી ઓપરેટરો દ્વારા આપવામાં આવે છે જેઓ સૌથી વધુ જટિલ વિસ્તારોમાં કન્વેયરની કામગીરીનું નિરીક્ષણ કરે છે. જ્યારે તૈયાર બટનો G1 અને G2 દબાવવામાં આવે છે, ત્યારે સિગ્નલ લેમ્પ LS1 અને LS2 પ્રકાશિત થાય છે અને રિલે RG1 અને RG2 સક્રિય થાય છે. બાદમાં આરપી શરૂ કરવા માટે રિલે તૈયાર કરે છે.
જ્યારે તમે સ્ટાર્ટ બટન દબાવો છો, ત્યારે RP ટ્રિગર થાય છે, જે સંપર્કકર્તા L1 ચાલુ કરે છે. ઇન્વર્ટર પોઝિશન, D1 અને D2નું સિંગલ-ફેઝ સિંક્રનાઇઝેશન છે. સમય વિલંબ પછી, કોન્ટેક્ટર્સ L1 અને L2 માં બનેલ લોલક રિલે વૈકલ્પિક રીતે L2 ચાલુ, L1 બંધ અને LZ ચાલુ કરે છે. ફ્રીક્વન્સી કન્વર્ટર મોટરના રિઓસ્ટેટની શરૂઆત સમયના સિદ્ધાંત (સમય રિલે RU1, RU2, RUZ) અનુસાર હાથ ધરવામાં આવે છે.
અંજીરમાં. 2 સબવે એસ્કેલેટરની ઇલેક્ટ્રિક ડ્રાઇવનો ડાયાગ્રામ બતાવે છે, જે તમને મુસાફરોના ઉદય અને પતન પર કામ કરવાની મંજૂરી આપે છે. 200 kW સુધીની શક્તિ સાથેના તબક્કાના રોટર સાથેની અસુમેળ મોટરનો ઉપયોગ ડ્રાઇવ મોટર તરીકે થાય છે. દિવસના અમુક સમયે, મુસાફરોના નજીવા પ્રવાહ સાથે, એસ્કેલેટર લાંબા સમય સુધી લગભગ નિષ્ક્રિય સ્થિતિમાં કામ કરી શકે છે.
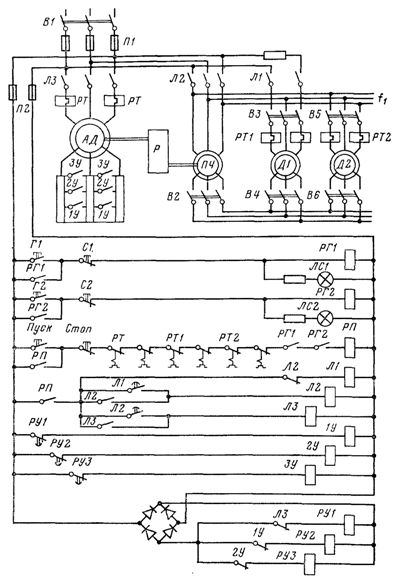
ચોખા. 1. સંકલિત ચળવળ સાથે કન્વેયર લાઇનની ઇલેક્ટ્રિકલ ડ્રાઇવની યોજના.
મોટરના પાવર ફેક્ટર અને કાર્યક્ષમતામાં વધારો કરવા માટે, જ્યારે તેનો શાફ્ટ લોડ નોમિનલના 40% જેટલો ઘટી જાય છે, ત્યારે સ્ટેટર વિન્ડિંગને ડેલ્ટાથી સ્ટારમાં ફેરવવામાં આવે છે. જેમ જેમ ભાર વધે છે, તે ત્રિકોણમાં પાછું વળે છે.
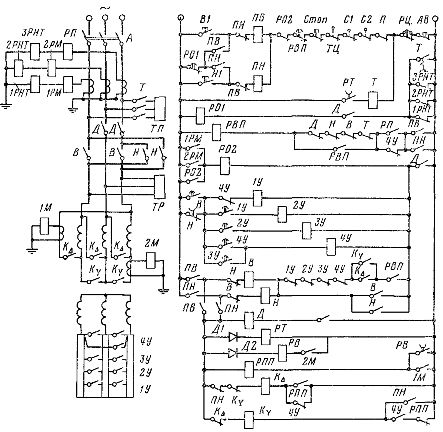
ચોખા. 2. સબવે એસ્કેલેટરની ઇલેક્ટ્રિક ડ્રાઇવની યોજના.
સેઇડ સ્વિચિંગ ઓવરકરન્ટ રિલે 1M અને 2M દ્વારા આપમેળે થાય છે, જે RPP અને РВ રિલે દ્વારા k∆ અને kY સંપર્કકર્તાઓને નિયંત્રિત કરે છે. આરવી સંપર્ક શરૂ થવામાં વિલંબ 2M બંધ અને 1M ચાલુ વચ્ચેના સમયગાળામાં RPP કોઇલ સર્કિટની હાજરીની ખાતરી કરે છે.
સંપૂર્ણ લોડ સાથે જનરેટર ડિસેન્ટ મોડમાં, ક્લાઇમ્બ મોડમાં સમાન લોડ કરતાં એન્જિન નોંધપાત્ર રીતે ઓછું લોડ થાય છે (ઇન્સ્ટોલેશનના યાંત્રિક નુકસાનને કારણે).તેથી, ડ્રોપ મોડમાં, મોટરનું સ્ટેટર વિન્ડિંગ હંમેશા સ્ટાર-કનેક્ટેડ હોય છે. એક્સિલરેટર કોન્ટેક્ટર્સ 1U-4U પર લોલક રિલેનો ઉપયોગ કરીને સમયના કાર્ય તરીકે મોટર શરૂ કરવામાં આવે છે. સ્ટોપ યાંત્રિક છે. આ કિસ્સામાં, મોટર શાફ્ટ પર સર્વિસ બ્રેક ટીપી ઇન્સ્ટોલ કરવામાં આવે છે, અને ગિયર અને મોટર શાફ્ટ વચ્ચેનું યાંત્રિક જોડાણ તૂટી જાય તો સીડી અટકે છે તેની ખાતરી કરવા માટે ડ્રાઇવ ગિયર શાફ્ટ પર સલામતી ટીપી ઇન્સ્ટોલ કરવામાં આવે છે.
સર્કિટ અગાઉના વિભાગમાં વર્ણવેલ લાક્ષણિક સલામતી ઇન્ટરલોક્સને અમલમાં મૂકે છે: સાધનસામગ્રીના યાંત્રિક ભાગની ખામીથી - સાંકળો અને હેન્ડ્રેલ્સને દૂર કરવા (મર્યાદા સ્વીચો TC, P), પગલાંની રચનાનું ઉલ્લંઘન (મર્યાદા સ્વીચો C1 અને C2) ), બેરિંગ્સનું વધુ પડતું તાપમાન ( થર્મલ રિલે 7), ઓવરસ્પીડથી (સેન્ટ્રીફ્યુગલ સ્પીડ રિલે આરસી).
વધુમાં, મોટર સુરક્ષા પૂરી પાડવામાં આવે છે: મહત્તમ (રિલે 1RM, 2RM), ઓવરલોડ (રિલે આરપી), મોટરમાંથી પાવર ગુમાવવાથી (શૂન્ય વર્તમાન રિલે 1RNT, 2RNT, 3RNT), પાવર કોન્ટેક્ટર્સના બંધ સંપર્કોના વેલ્ડિંગથી. (કોઇલ સર્કિટ RVP માં D, Y, B, T અને કોઇલ સર્કિટ B માં 1U-4U ખોલવા).
પાવર લોસ, બેરિંગ ઓવરહિટીંગ અને મોટર ઓવરલોડ સામે રક્ષણ સમય રિલે PO1 અને RVP દ્વારા નિર્ધારિત સમય વિલંબ સાથે કાર્ય કરે છે. રિમોટ કંટ્રોલ સ્પીડ રિલે સિવાયના તમામ સંરક્ષણો, મોટરને મેઇન્સથી ડિસ્કનેક્ટ કરીને અને TP સર્વિસ બ્રેક લગાવીને બંધ કરે છે. ફક્ત બ્રેકિંગ પ્રક્રિયાના અંતે, પીટી રિલેના વિલંબની સમયસીમા સમાપ્ત થયા પછી, સલામતી બ્રેક ટીપી વધુમાં સક્રિય થાય છે.જ્યારે RC સ્પીડ રિલે સક્રિય થાય છે અથવા ઇમરજન્સી સ્ટોપ બટન દબાવવામાં આવે છે, ત્યારે બંને બ્રેક એકસાથે લાગુ થાય છે.