ઇલેક્ટ્રિક મોટર સાથે ઇલેક્ટ્રિક એક્ટ્યુએટરના આકૃતિઓ
 ઈલેક્ટ્રિક મોટર સાથેના ઈલેક્ટ્રિક એક્ટ્યુએટરને ક્રિયાના રોટરી સિદ્ધાંત (બોલ અને પ્લગ વાલ્વ, થ્રોટલ વાલ્વ, ડેમ્પર્સ) સાથે શટ-ઑફ અને કંટ્રોલ પાઈપલાઈન વાલ્વના વિવિધ ભાગોને ખસેડવા માટે બનાવવામાં આવ્યા છે.
ઈલેક્ટ્રિક મોટર સાથેના ઈલેક્ટ્રિક એક્ટ્યુએટરને ક્રિયાના રોટરી સિદ્ધાંત (બોલ અને પ્લગ વાલ્વ, થ્રોટલ વાલ્વ, ડેમ્પર્સ) સાથે શટ-ઑફ અને કંટ્રોલ પાઈપલાઈન વાલ્વના વિવિધ ભાગોને ખસેડવા માટે બનાવવામાં આવ્યા છે.
ડ્રાઇવના મુખ્ય એકમો છે: ઇલેક્ટ્રિક મોટર, રીડ્યુસર, મેન્યુઅલ ડ્રાઇવ, પોઝિશન સિગ્નલિંગ યુનિટ. મિકેનિઝમ સિંક્રનસ અને અસિંક્રોનસ એસી મોટર્સનો ઉપયોગ કરે છે. ગતિમાં ઘટાડો અને ટોર્ક વધારો સંયુક્ત કૃમિ અને ગિયર ગિયર્સનો ઉપયોગ કરીને પરિપૂર્ણ થાય છે. હેન્ડ ડ્રાઇવનો ઉપયોગ કરીને મેન્યુઅલ નિયંત્રણ કરવામાં આવે છે. એન્જીન અટકી જવાથી શાફ્ટની ધરી પર દબાણ કરીને હેન્ડવ્હીલને મારવાથી હેન્ડવ્હીલ મોટર શાફ્ટ સાથે જોડાય છે અને આઉટપુટ શાફ્ટમાં ટોર્ક ટ્રાન્સમિટ કરે છે.
ઇલેક્ટ્રિક મોટર ડ્રાઇવ્સ સિંગલ-ટર્ન અને મલ્ટિ-ટર્ન, સ્થિતિ અને પ્રમાણસર છે. બે-તબક્કાના કેપેસિટર મોટર સાથેના બે-સ્થિતિ એક્ટ્યુએટરનું રેખાકૃતિ ફિગમાં બતાવવામાં આવ્યું છે. 1 (એ).
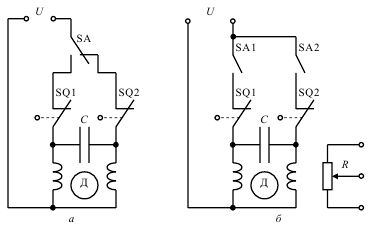
ચોખા. 1.બે-તબક્કાના ઇલેક્ટ્રિક મોટર્સ સાથે એક્ટ્યુએટરની યોજનાઓ: બે-પોઝિશન એક્ટ્યુએટરનું એ-ડાયાગ્રામ; b — પ્રમાણસર એક્ટ્યુએટરનો આકૃતિ
સ્વીચ SA ઇલેક્ટ્રિક મોટરના રોટરના પરિભ્રમણની દિશા નિર્ધારિત કરે છે, કેપેસિટર C ને ઇલેક્ટ્રિક મોટરના એક અથવા બીજા વિન્ડિંગ સાથે જોડે છે. જો સ્વિચ SA SQ1 ધરાવતી સર્કિટને બંધ કરે છે, તો પછી ઇલેક્ટ્રિક મોટર ચાલુ થાય છે અને એક્ટ્યુએટર આઉટપુટ ઘટકને જ્યાં સુધી તે અંતિમ સ્થાને પહોંચે છે અને મર્યાદા સ્વીચ SQ1 ને સ્વિચ કરે છે ત્યાં સુધી ખસેડે છે. આ કિસ્સામાં, સંપર્ક SQ1 ખુલશે, મોટર બંધ થઈ જશે. આઉટપુટ અંગને બીજા છેડાની સ્થિતિમાં ખસેડવા માટે, SA ને સ્વિચ કરવું જરૂરી છે. મોટર ઉલટી છે અને SQ2 મર્યાદા સ્વીચ સંપર્ક ખુલે ત્યાં સુધી ચાલશે.
પ્રમાણસર એક્ટ્યુએટરનું આકૃતિ ફિગમાં બતાવવામાં આવ્યું છે. 1 (બી). SA1 સંપર્કને બંધ કરવાથી ડ્રાઇવ આઉટપુટ તત્વ આગળની દિશામાં જાય છે, અને SA2 ને વિપરીત દિશામાં બંધ કરે છે. સંપર્ક ખોલીને, તમે આઉટપુટ તત્વની કોઈપણ મધ્યવર્તી સ્થિતિમાં મિકેનિઝમને રોકી શકો છો. પોટેન્ટિઓમીટર R નો ઉપયોગ પોઝિશન ટ્રાન્સમીટર તરીકે થાય છે. મર્યાદા સ્વીચો SQ1 અને SQ2 મિકેનિઝમને નુકસાનથી સુરક્ષિત કરીને, અંતિમ સ્થિતિમાં ઇલેક્ટ્રિક મોટરને બંધ કરે છે.
ત્રણ-તબક્કાની ઇલેક્ટ્રિક મોટર સાથેની ડ્રાઇવ મિકેનિઝમનો આકૃતિ ફિગમાં બતાવવામાં આવ્યો છે. 3.
આવા એક્ટ્યુએટરનો ઉપયોગ કરી શકાય છે, ઉદાહરણ તરીકે, વાલ્વને નિયંત્રિત કરવા માટે. સર્કિટમાં સંપર્કકર્તા KM1 હોય છે, જેમાં એક્ચ્યુએટર વાલ્વ ખોલવાની પદ્ધતિનો સમાવેશ થાય છે, જેમાં ઓપનિંગ બટન SB1 હોય છે અને ક્લોઝિંગ બટન SB2 સાથે સંપર્કકર્તા KM2 હોય છે. મર્યાદા સ્વીચ SQ1 બંધ છેડાની સ્થિતિમાં કાર્ય કરે છે.ડાયાગ્રામમાં, મર્યાદા સ્વીચો વાલ્વની મધ્ય સ્થિતિમાં દર્શાવવામાં આવી છે, તેમાંથી કોઈ પણ કામ કરતું નથી.
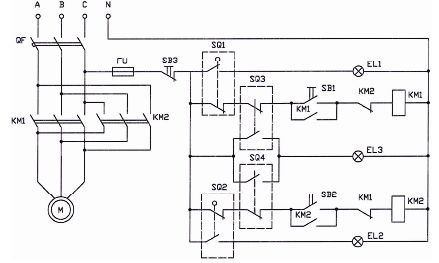
ચોખા. 2. ત્રણ તબક્કાના ઇલેક્ટ્રિક મોટર સાથે ડ્રાઇવની યોજના
જ્યારે તમે SB1 બટન દબાવો છો, ત્યારે KM1 કામ કરશે અને શટર ખોલવા માટે ઇલેક્ટ્રિક મોટર ચાલુ કરશે. સંપૂર્ણપણે ખુલ્લી સ્થિતિમાં, SQ1 કામ કરશે અને તેના શરૂઆતના સંપર્ક સાથે તે KM1 અને તે મુજબ, ઇલેક્ટ્રિક મોટરને બંધ કરશે અને તેના બંધ સંપર્ક સાથે તે સિગ્નલ લેમ્પ EL1 «ઓપન» ચાલુ કરશે.
જો તમે પછી SB2 બટન દબાવો, તો KM2 ચાલશે અને વાલ્વ બંધ કરવા માટે ઇલેક્ટ્રિક મોટર ચાલુ કરશે. જ્યારે વાલ્વ બંધ હોય, ત્યારે SQ2 કામ કરશે, KM2 બંધ કરશે અને બંધ એલાર્મ (EL2) સક્રિય કરશે.
ડ્રાઇવ મિકેનિઝમ ટોર્ક લિમિટિંગ ક્લચથી સજ્જ છે. જો શાફ્ટ ટોર્ક ઓળંગાઈ જાય, ઉદાહરણ તરીકે, જ્યારે ઓપનિંગ પ્રક્રિયા દરમિયાન વાલ્વ અટવાઈ જાય, તો સ્વીચ SQ3 બંધ થશે અને સંપર્કકર્તા KM1 બંધ કરીને ઇલેક્ટ્રિક મોટરને બંધ કરશે. જો ક્લોઝિંગ પ્રક્રિયા દરમિયાન મિકેનિઝમ અટકી જાય, તો SQ4 KM2 અને ઇલેક્ટ્રિક મોટરને ઓપરેટ કરશે અને બંધ કરશે. બંને સ્વીચો, જ્યારે સક્રિય થાય છે, ત્યારે EL3 પર "મુશ્કેલી" સૂચક પ્રકાશને પ્રકાશિત કરે છે. મધ્યવર્તી વાલ્વ સ્થિતિમાં એન્જિનને રોકવા માટે SB3 બટનનો ઉપયોગ કરી શકાય છે.