મિકેનિઝમ્સના ઑપરેશન માટે ટાઇમિંગ ડાયાગ્રામ અને બ્લોક ડાયાગ્રામ દોરવાનું ઉદાહરણ
તકનીકી રેખાઓની નિયંત્રણ યોજનાઓમાં, આઉટપુટ તત્વોની સ્થિતિ, એટલે કે. એક્ટ્યુએટર્સ (ઇલેક્ટ્રોમેગ્નેટિક રિલે, મેગ્નેટિક સ્ટાર્ટર્સ, સોલિડ-સ્ટેટ રિલે, વગેરે), માત્ર ઇનપુટ અથવા રીસીવિંગ એલિમેન્ટ્સ (બટન્સ, સેન્સર્સ, વગેરે) ના સંયોજન દ્વારા જ નહીં, પરંતુ સમય જતાં તેમના ફેરફારના ક્રમ દ્વારા પણ નક્કી કરવામાં આવે છે.
ડિઝાઇન કરેલી તકનીકી પ્રક્રિયાનું મૌખિક વર્ણન ઇનપુટ અને આઉટપુટ સિગ્નલોમાં ફેરફારોના શેડ્યૂલના સ્વરૂપમાં રજૂ કરી શકાય છે, જેને તકનીકી પ્રક્રિયાનો સમય રેખાકૃતિ કહેવામાં આવે છે.

અનાજની પૂર્વ-સફાઈ લાઇન ડાયાગ્રામના આધારે ટાઇમિંગ ડાયાગ્રામ બનાવવાનું ઉદાહરણ બનાવવામાં આવશે.
સર્કિટ કામગીરીનું વર્ણન
SA1 સ્વીચનો ઉપયોગ કરીને, ઓપરેટિંગ મોડ પસંદ થયેલ છે: સ્વચાલિત — મુખ્ય ઑપરેટિંગ મોડ, મેન્યુઅલ — કમિશનિંગ મોડ.
કમિશનિંગ મોડમાં તમામ નિયંત્રણ તર્કને બાયપાસ કરીને, રેખીય મિકેનિઝમ્સના ચુંબકીય સ્ટાર્ટર્સના કોઇલને લોકીંગ બટનો SB4-SB6 દ્વારા પાવર સપ્લાય કરવાનો સમાવેશ થાય છે. આ મોડમાં, ઓપરેટર પોતે લાઇનની લંબાઈ અથવા અમુક અલગ મિકેનિઝમ નક્કી કરે છે, હોપરના ભરવાનું નિયંત્રણ ફક્ત દૃષ્ટિની રીતે હાથ ધરવામાં આવે છે.
નિયમ પ્રમાણે, ઓપરેશનના આ મોડનો ઉપયોગ કાં તો ઓપરેશનના ઇમરજન્સી મોડ્સમાં થાય છે, જ્યારે નિયંત્રણ તર્ક તૂટી જાય છે અને લાઇન પર ઉત્પાદન ગુમાવ્યા વિના, અથવા કમિશનિંગ દરમિયાન, જ્યારે અમુક મિકેનિઝમની સમારકામ પછી તકનીકી પ્રક્રિયા પૂર્ણ કરવી જરૂરી છે. લાઇન પર, ફક્ત તે જ શરૂ કરવું જરૂરી છે, બધી રેખીય પદ્ધતિઓ નહીં.
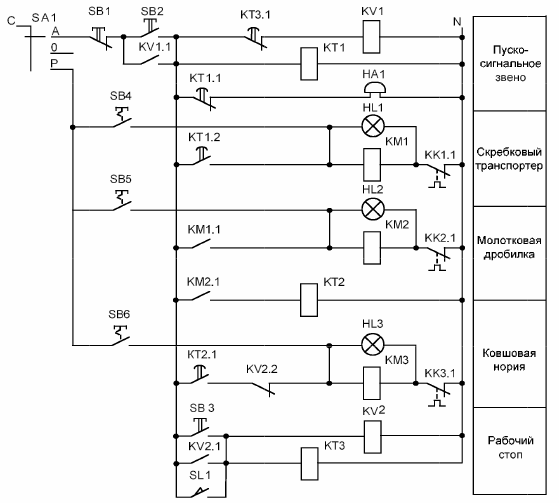
ચોખા. 1. અનાજ પૂર્વ-સફાઈ લાઇનનું રિલે-સંપર્ક નિયંત્રણ સર્કિટ
ઓપરેટિંગ મોડ સ્વિચ પછી, કંટ્રોલ સર્કિટમાં સ્ટાર્ટ-અપ સિગ્નલિંગ બ્લોકનો સમાવેશ થાય છે, જે સમય વિલંબ સાથે, એક સાથે બેલને બંધ કરવા અને સ્ક્રેપર કન્વેયરને ચાલુ કરવાની મંજૂરી આપે છે. રિલે-સંપર્ક સર્કિટ કંપોઝ કરતી વખતે, મિકેનિઝમ્સને ચાલુ અથવા બંધ કરવાનો ક્રમ ચુંબકીય સ્ટાર્ટર્સના બંધ સંપર્કો દ્વારા હાથ ધરવામાં આવે છે.
તેથી અમારા કિસ્સામાં, જો ચુંબકીય સ્ટાર્ટર KM1 (સ્ક્રેપર કન્વેયર) ની કોઇલ પર ઊર્જા હોય, તો અનુક્રમે, સંપર્ક KM1.1 દ્વારા, પાવર મેગ્નેટિક સ્ટાર્ટર KM2 (હેમર) ની કોઇલ પર પણ હશે.
તે જ સમયે, લાઇનની તમામ મિકેનિઝમ્સ શરૂ કરવી અવ્યવહારુ છે, કારણ કે ઓપરેશન દરમિયાન આવી ઓપરેશન મોડ આવી શકે છે જ્યારે લાઇનની બે મિકેનિઝમ્સની ઇલેક્ટ્રિક ડ્રાઇવ્સ હજી સુધી તેમના નજીવા ઓપરેશન મોડ પર પહોંચી નથી, અને ઉત્પાદન હેડ મિકેનિઝમ દ્વારા તેમને પહોંચાડવામાં આવે છે, જેના પરિણામે લાઇનનો ઇમરજન્સી સ્ટોપ થાય છે. તેથી, કંટ્રોલ સર્કિટમાં, હેડ મિકેનિઝમના ચુંબકીય સ્ટાર્ટર KM3 ની કોઇલને પાવર સપ્લાય કરવામાં આવે છે, જે સમય રિલે KT2 દ્વારા સમજાય છે.
રેખીય મિકેનિઝમ્સ રોકાયેલા છે, કામ ચાલુ છે. કેટલીકવાર ઓપરેશન દરમિયાન એવો સમય આવે છે જ્યારે હોપર હજુ સુધી ભરાયેલું નથી અને લાઇન બંધ કરવી આવશ્યક છે. આ કિસ્સામાં, નિયંત્રણ યોજનામાં "વર્ક સ્ટોપ" બ્લોકનો ઉપયોગ કરવામાં આવે છે, જે યોગ્ય ક્રમમાં (લાઇન સાથે ઉત્પાદનની હિલચાલની દિશામાં) લાઇનની તમામ પદ્ધતિઓને બંધ કરવાનું શક્ય બનાવે છે.
તેથી, જ્યારે SB3 બટન દબાવવામાં આવે છે, ત્યારે મધ્યવર્તી રિલે KV2 ચાલુ થાય છે, જેનો પ્રારંભિક સંપર્ક KV2.2 કોઇલ KM3 સાથે સર્કિટને તોડે છે, લાઇન હેડ મિકેનિઝમ બંધ થાય છે. તે જ સમયે, ટાઇમ રિલે KT3 ઉત્પાદનમાંથી મિકેનિઝમ્સને સાફ કરવા માટે લાઇનના ઑપરેશન ટાઇમ પર રિપોર્ટ તૈયાર કરે છે.
ચોક્કસ સમય પછી, સમય રિલે KT3.1 નો સંપર્ક મધ્યવર્તી રિલે KV1 સાથે સર્કિટને તોડે છે, જેનો સંપર્ક પ્રારંભ બટનને બાયપાસ કરે છે. આના કારણે સમગ્ર કંટ્રોલ સર્કિટ બંધ થઈ જાય છે અને પરિણામે, રેખીય પદ્ધતિઓ બંધ થઈ જાય છે. SL1 હોપરમાં લેવલ સેન્સરને ટ્રિગર કરતી વખતે કંટ્રોલ સર્કિટના સંચાલન માટે સમાન અલ્ગોરિધમ.
પ્રસ્તુત કંટ્રોલ સ્કીમમાં ઓવરલોડથી રેખીય ઇલેક્ટ્રિક મોટર્સનું રક્ષણ થર્મલ રિલે KK1.1 ... KK3.1 ના સંપર્કમાં વિક્ષેપ દ્વારા હાથ ધરવામાં આવે છે, જે ચુંબકીય સ્ટાર્ટર KM1 ના કોઇલ સાથે સર્કિટમાં અનુક્રમે શ્રેણીમાં સ્થાપિત થાય છે. KM3.
કંટ્રોલ સર્કિટમાં રેખીય મિકેનિઝમ્સના ઑપરેશનના દ્રશ્ય નિયંત્રણ માટે ત્યાં સૂચક લેમ્પ્સ HL1 ... HL3 છે. રેખીય મિકેનિઝમ્સની સામાન્ય કામગીરીમાં, સૂચક લેમ્પ્સ પ્રકાશિત થશે. કટોકટી શટડાઉનના કિસ્સામાં, ચુંબકીય સ્ટાર્ટર સાથેના સર્કિટમાં પાવર અદૃશ્ય થઈ જાય છે અને તે મુજબ સૂચક દીવો બહાર જાય છે.
ઑપરેશનના ઇલેક્ટ્રિકલ મુખ્ય સ્વચાલિત મોડની યોજના અનુસાર, અનાજની પૂર્વ-સફાઈ લાઇન માટે 3 બટનોની જરૂર છે: SB1 «સ્ટોપ», SB2 «સ્ટાર્ટ» અને SB3 «વર્ક સ્ટોપ», તેમજ લેવલ સેન્સર SL1. આમ આપણી પાસે 4 ઇનપુટ તત્વો છે. ઉપરાંત, સ્વ-રીટર્ન સાથે બટનો સ્વીકારવામાં આવે છે, એટલે કે. પાવર-ઓન સ્થિતિને ઠીક કર્યા વિના.
સમયનો ચાર્ટ બનાવવાનું ઉદાહરણ
આઉટપુટ વસ્તુઓ 4: બેલ HA1, સ્ક્રેપર કન્વેયર KM1, હેમર ક્રશર KM2 અને બકેટ એલિવેટર KM3.
જ્યારે SB2 «સ્ટાર્ટ» બટન દબાવવામાં આવે છે, ત્યારે કર્મચારીઓને ચેતવણી આપવા માટે પ્રથમ ટ્રિગર લિંક (બેલ HA1) 10 સેકન્ડ માટે સક્રિય થવી જોઈએ કે પ્રક્રિયા લાઇન શરૂ થવાની છે.
HA1 ની ઘંટડી વાગે પછી, એટલે કે. "સ્ટાર્ટ" બટન SB2 86 દબાવવાની 10 સેકન્ડ પછી, સ્ક્રેપર કન્વેયર KM1 અને ઈમ્પેક્ટ ક્રશર KM2 ચાલુ થઈ જાય છે (ફિગ. 2 જુઓ).
મિકેનિઝમનો કાર્યકારી સમય તેમની ઉત્પાદકતા અને ઉત્પાદન વોલ્યુમના આધારે નક્કી કરવામાં આવે છે. સ્ક્રેપર કન્વેયર, હેમર ક્રશર અને બકેટ એલિવેટરની ઉત્પાદકતા અનુક્રમે 5 t/h, 3 t/h અને 2 t/h છે. અનાજની માત્રા નક્કી કરવામાં આવે છે. હૂપરના વોલ્યુમ અને 1 એમ 3 દીઠ એક કિલોગ્રામ અનાજના આધારે.
વિવિધ પાકોના અનાજનો આકાર, ઘનતા અને અનુરૂપ વજન અલગ-અલગ હોય છે, તેથી દરેક પ્રકારના અનાજનું એક ઘન મીટર એકસરખું વજન કરી શકતું નથી.
ચાલો બંકરનું પ્રમાણ 5 મીટર લઈએ. લોડ કરેલ અનાજ બિયાં સાથેનો દાણો છે, જેનું વજન 560 - 660 કિગ્રા છે. રિસાયકલ બિનની પ્રારંભિક સ્થિતિ ખાલી છે. પછી સંપૂર્ણ કન્ટેનરમાં અનાજનો જથ્થો: N = 580 x 5 = 2900 kg.
બકેટ એલિવેટર તમામ મિકેનિઝમ્સની સૌથી ઓછી ઉત્પાદકતા ધરાવે છે; તે લાઇનમાં અનાજ પણ સપ્લાય કરે છે. તેનો કાર્યકારી સમય હશે: Tm3 = 2000/2900 = 0.689 h = 41 મિનિટ.
બાકીની મિકેનિઝમ્સનો કાર્યકારી સમય 41 મિનિટથી વધુ હશે અને તે સર્કિટના તર્કના આધારે નક્કી કરવામાં આવે છે.
સ્ક્રેપર કન્વેયર KM1 અને ઇમ્પેક્ટ ક્રશર KM2 ચાલુ કર્યા પછી, તેમને વેગ આપવા માટે સમય આપવો આવશ્યક છે. તમામ મિકેનિઝમ્સ માટે પ્રવેગક સમય લેવામાં આવે છે - 10 સેકન્ડ. બકેટ લિફ્ટર KM3 છેલ્લે (KM1 અને KM2 શરૂ કર્યા પછી 10 સેકન્ડ પછી) શરૂ કરવામાં આવે છે જેથી હેમર ક્રશર KM2 અને સ્ક્રેપર કન્વેયર KM1 પર ઉત્પાદન અવરોધ ન સર્જાય. 41 મિનિટ પછી, હોપર ભરવા માટે જરૂરી તમામ ઉત્પાદન KM3 બકેટ એલિવેટરમાંથી પસાર થશે.
SL લેવલ સેન્સર એવી રીતે ઇન્સ્ટોલ કરેલું છે કે ઉત્પાદનના અવશેષો હેમર ક્રશર KM2 અને સ્ક્રેપર કન્વેયર KM1માંથી પસાર થાય તે પહેલાં જ હૉપર ફિલિંગ સિગ્નલ પ્રાપ્ત થાય છે.
જ્યારે SL1 લેવલ સેન્સર કાર્યરત થાય છે, ત્યારે KM3 હેડ મિકેનિઝમ બંધ થઈ જાય છે (SB2 «પ્રારંભ» બટન દબાવ્યા પછી 41 મિનિટ અને 20 સેકન્ડ પછી). સમય વિલંબ સાથે, KM1 અને KM2 એકસાથે બંધ થાય છે. આ સમયનો વિલંબ 20 સેકન્ડ જેટલો માની શકાય.
સામાન્ય કામગીરી માટેનો સમય આકૃતિ આકૃતિ 2 માં દર્શાવેલ છે.
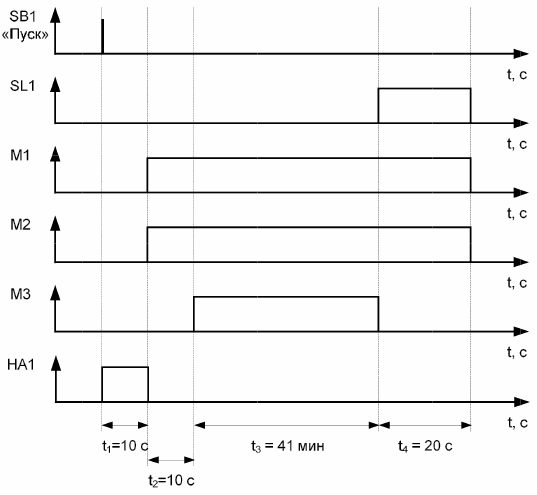
ચોખા. 2. સામાન્ય કામગીરી માટે સમય રેખાકૃતિ
"ઓપરેશન સ્ટોપ" મોડમાં, ઓપરેટર લેવલ સેન્સર SL1 ને ટ્રિગર કરતા પહેલા પ્રક્રિયાને રોકી શકે છે, તેથી આ કિસ્સામાં મિકેનિઝમ્સના સંચાલનનો સમય નક્કી કરવાનું અશક્ય છે. "જનરલ સ્ટોપ" મોડમાં, બધી મિકેનિઝમ્સ તરત જ નિષ્ક્રિય થઈ જાય છે.
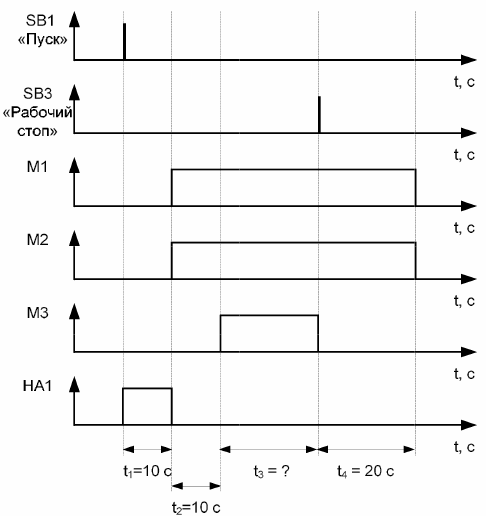
ચોખા. 3. ઓપરેશનના "ઓપરેશન સ્ટોપ" મોડ માટે સમય રેખાકૃતિ
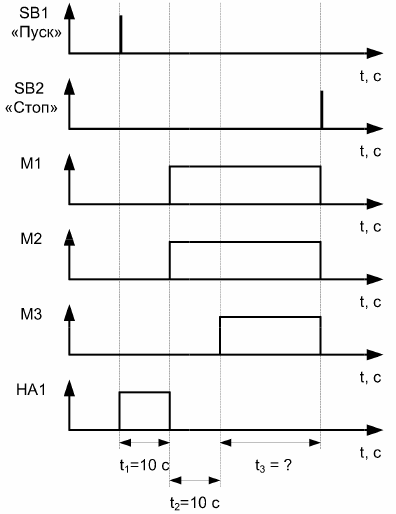
ચોખા. 4. "કુલ સ્ટોપ" મોડ માટે સમય રેખાકૃતિ
મિકેનિઝમ્સના ઓપરેશનના બ્લોક ડાયાગ્રામ બનાવવાનું ઉદાહરણ
તકનીકી પ્રક્રિયાના બ્લોક ડાયાગ્રામમાં તેના કાર્યનું અલ્ગોરિધમ સ્પષ્ટપણે દર્શાવવું આવશ્યક છે. આ માટે, ચોક્કસ ક્રિયાઓના વિશિષ્ટ હોદ્દાનો ઉપયોગ કરવામાં આવે છે.
આકૃતિ 5 અનાજ પ્રી-ક્લીનિંગ લાઇન માટે બ્લોક ડાયાગ્રામનું ઉદાહરણ બતાવે છે. પ્રસ્તુત બ્લોક ડાયાગ્રામ તકનીકી પ્રક્રિયાના કાર્ય માટેના તમામ સંભવિત વિકલ્પો બતાવે છે. "પ્રારંભ કરો" બટન SB2 દબાવ્યા પછી અનાજની પૂર્વ-સફાઈ લાઇનની કામગીરી દરમિયાન કોઈપણ સમયે "અકસ્માત" પરિસ્થિતિ આવી શકે છે.
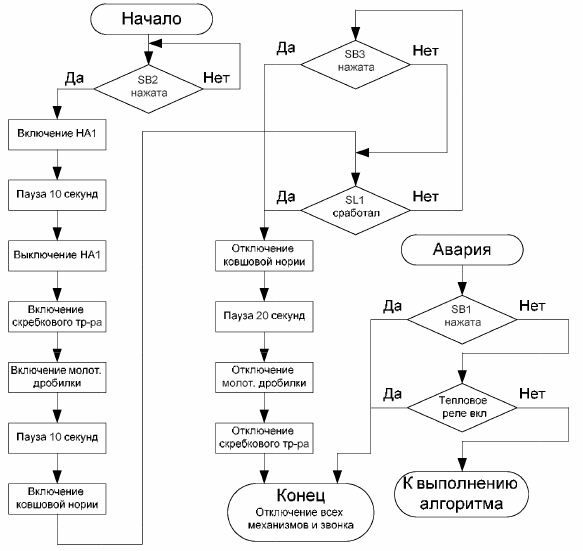
ચોખા. 5. અનાજની પૂર્વ-સફાઈ લાઇનનો બ્લોક ડાયાગ્રામ