ઓવરહેડ ક્રેન્સ સાથે ઇલેક્ટ્રિક ટ્રોલી ડ્રાઇવ
ઓવરહેડ ક્રેન સાથેની ટ્રોલી એ લિફ્ટિંગ ડિવાઇસનું એક સ્વતંત્ર તત્વ છે અને તે ચળવળની તકનીકી રીતે નિર્ધારિત ગતિ અને લોડને સ્થાન આપવાની આવશ્યક ચોકસાઈ સાથે ઓવરહેડ ક્રેનની શ્રેણીમાં લોડને ખસેડવા માટે રચાયેલ છે. બોગી ડ્રાઇવ એ ઓવરહેડ ક્રેન સાધનોના મુખ્ય ઘટકોમાંનું એક છે.
ટ્રોલી ઓવરહેડ ક્રેનના ટ્રેક પર આગળ વધે છે. પુલ પોતે કાર્ટની ગતિની દિશાને લંબરૂપ દિશામાં આગળ વધે છે. કાર્ટ પર એક લિફ્ટિંગ મિકેનિઝમ ઇન્સ્ટોલ કરેલું છે, જે હૂક (અથવા ઇલેક્ટ્રોમેગ્નેટ) થી સજ્જ છે જેની સાથે તમે લોડને ખસેડી શકો છો. બોગીની હિલચાલ એ ઓવરહેડ ક્રેન (ફિગ. 1) ના તકનીકી ચક્રનો એક અભિન્ન ભાગ છે.
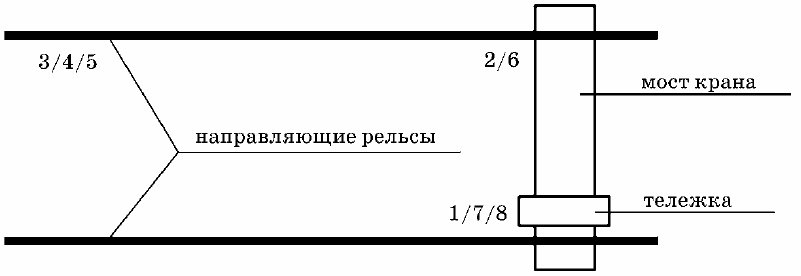
ચોખા. 1. કાર્ય ચક્રમાં બ્રિજ ક્રેન વડે કામગીરી હાથ ધરવા માટેની યોજના
આ ચક્રમાં નીચેના ઑપરેશન્સનો સમાવેશ થાય છે (આકૃતિ 1 માં, ઑપરેશન નંબર્સ નંબરમાં બતાવવામાં આવ્યા છે):
1 - ભાર ઉપાડવો;
2 — કાર્ટને આપેલ સ્થિતિમાં ખસેડવું;
3 - ક્રેનને પૂર્વનિર્ધારિત સ્થિતિમાં ખસેડવું;
4 - બોજનું વજન ઘટાડવું;
5 - ભારના વજન સાથે હૂકને ઉપાડવું;
6 - ક્રેનને તેની મૂળ સ્થિતિમાં ખસેડવું;
7 — કાર્ટને તેની મૂળ સ્થિતિમાં ખસેડવું;
8 - હૂક ઘટાડવું.
ઓવરહેડ ક્રેનની પ્રક્રિયા ચક્રમાંથી જોઈ શકાય છે તેમ, ટ્રોલી ડ્રાઈવ મોટર બીજી અને સાતમી કામગીરીમાં ચાલુ થાય છે. જ્યારે બોગી ઓવરહેડ ક્રેનના અંતરમાં આપેલ સ્થાનની નજીક આવે છે, ત્યારે જરૂરી બ્રેકિંગ ચોકસાઈની ખાતરી કરવા માટે બોગી ડ્રાઈવની ઇલેક્ટ્રિક મોટરને ઇલેક્ટ્રિકલી બ્રેક કરવામાં આવે છે.
પછી એન્જિન બંધ કરવામાં આવે છે અને યાંત્રિક બ્રેક લાગુ કરવામાં આવે છે. વધુમાં, બ્રિજ ચળવળની ઇલેક્ટ્રિક ડ્રાઇવ ચાલુ છે અને લોડ તકનીકી કાર્ય અનુસાર વર્કશોપ સાથે આગળ વધે છે. નિયુક્ત સ્થાને પહોંચતા, ક્રેન અટકી જાય છે, ભાર ઓછો થાય છે, અને પછી જરૂરી તકનીકી કામગીરી હાથ ધરવામાં આવે છે.

ઓવરહેડ ક્રેન્સ સાથે ટ્રોલી મૂવમેન્ટ મિકેનિઝમનો કાઇનેમેટિક ડાયાગ્રામ આકૃતિ 2 માં બતાવવામાં આવ્યો છે. ડ્રાઇવ વ્હીલ્સ વચ્ચે મધ્યમાં ગિયરબોક્સ સાથે ટ્રોલી મૂવમેન્ટ મિકેનિઝમ સ્કીમ અનુસાર બનાવવામાં આવે છે.
બ્રેક ડિસ્ક T, ગિયરબોક્સ P, ક્લચ M અને શાફ્ટ્સ B દ્વારા ઇલેક્ટ્રિક મોટર ડીથી ચાલતા વ્હીલ્સમાં પ્રસારિત થાય છે. કાર્ટને સ્થિર રાખવા માટે બ્રેક પુલીનો ઉપયોગ થાય છે.
કાર્ટમાં ચાર ટ્રાવેલ વ્હીલ્સ અને બે ડ્રાઈવ વ્હીલ્સ છે. ક્રેન ટ્રોલીના ટ્રાવેલિંગ વ્હીલ્સ સામાન્ય રીતે બે પાંસળીથી બનાવવામાં આવે છે.
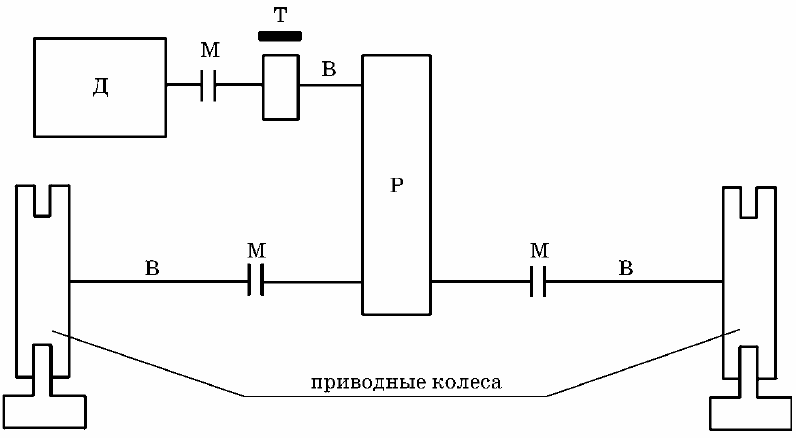
ચોખા. 2. ટ્રોલી મૂવમેન્ટ મિકેનિઝમનું કાઇનેમેટિક ડાયાગ્રામ
કાર્ટને નિર્દિષ્ટ સ્થાને ખસેડવાનો સમય જરૂરી પ્રવેગ સાથે કાર્ટને વેગ આપવા અને ધીમો પાડવાના સમયને ધ્યાનમાં લઈને નક્કી કરવામાં આવશે.તકનીકી પ્રક્રિયાની શરતોના આધારે, કાર્ટને ખસેડતી વખતે ટેકોગ્રામમાં આકૃતિ 3 માં બતાવેલ ફોર્મ હોવું જોઈએ.
જરૂરી પ્રવેગક સાથે આપેલ ઝડપે બોગી મિકેનિઝમની સરળ શરૂઆતની ખાતરી કરવી જરૂરી છે. જરૂરી સ્થિતિની ચોકસાઈને સુનિશ્ચિત કરવા માટે, ઘટાડેલી ગતિમાં સંક્રમણ સાથે ઇલેક્ટ્રિક ડ્રાઇવની સરળ મંદી જરૂરી છે, જેના પછી ટ્રોલી અટકી જાય છે.
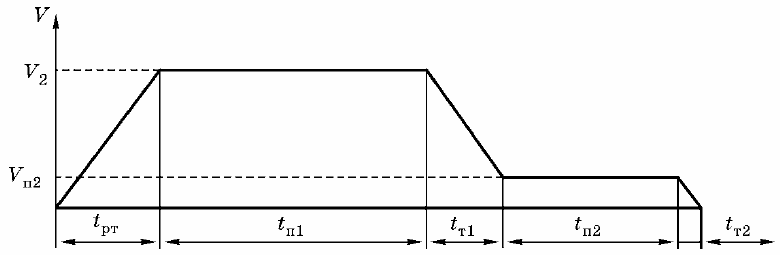
ચોખા. 3. ટ્રોલી મૂવમેન્ટ મિકેનિઝમનો ટેચોગ્રામ
રેલના સાંધામાં મેટલ સ્ટ્રક્ચર પર અસર સાથે બોગીની હિલચાલ, તીવ્ર પ્રવેગ અને મંદી, જ્યારે મશીનો લોડ કરવામાં આવે ત્યારે મેટલ સ્ટ્રક્ચરના કુદરતી કંપનો બ્રિજ ક્રેન બોગી પર સ્થિત વિદ્યુત ઉપકરણો પર ખૂબ જ તીવ્ર યાંત્રિક અસરોનું કારણ બને છે. તેના આધારે, ટ્રોલીને ખસેડવા માટેની ઇલેક્ટ્રિક ડ્રાઇવ નીચેની આવશ્યકતાઓને પૂર્ણ કરવી આવશ્યક છે:
1) ઇલેક્ટ્રિક ડ્રાઇવને ગતિમાં મિકેનિઝમ શરૂ કરવાની, ચળવળની દિશા ઉલટાવી અને જરૂરી પ્રવેગક (m / s2) અને યોગ્ય સ્થિતિની ચોકસાઈ (mm) સાથે મિકેનિઝમને રોકવાની ક્ષમતા પ્રદાન કરવી આવશ્યક છે;
2) ઇલેક્ટ્રિક ડ્રાઇવને મુખ્યથી નીચે સરળ ગતિ નિયંત્રણ પ્રદાન કરવું આવશ્યક છે;
3) વિકસિત એન્જિન ટોર્કે આપેલ તીવ્રતા પર મિકેનિઝમના સંચાલનની ખાતરી કરવી આવશ્યક છે;
4) આપેલ સંખ્યામાં એન્જિન પ્રતિ કલાક શરૂ થાય છે, તેના વિન્ડિંગ્સને વધુ ગરમ કરવું જોઈએ નહીં, જેના કારણે મિકેનિઝમનું લાંબા સમય સુધી રોકવું શક્ય છે;
5) મોટરને ઓપરેટિંગ શરતો અનુસાર પસંદ કરવી આવશ્યક છે, એટલે કે, તેની યોગ્ય ડિઝાઇન હોવી આવશ્યક છે, અને તેની વિન્ડિંગ્સ ગરમી-પ્રતિરોધક હોવી જોઈએ અને ભેજ સામે ઇન્સ્યુલેશન હોવી જોઈએ;
6) ડ્રાઇવ મોટરમાં ફ્લાયવ્હીલનો સૌથી નાનો સમૂહ હોવો આવશ્યક છે જે વારંવાર ડ્રાઇવ શરૂ થવા દરમિયાન ટ્રાન્ઝિઅન્ટ્સના પ્રવાહ પર નોંધપાત્ર અસર કરે છે;
7) ડ્રાઇવ મોટર ચાલતી મિકેનિઝમની શક્તિ સાથે મેળ ખાતી હોવી જોઈએ અને જરૂરી ઓવરલોડ ક્ષમતા હોવી જોઈએ;
8) ઇલેક્ટ્રિક ડ્રાઇવને લઘુત્તમ અવધિ સાથે ક્ષણિક પ્રક્રિયાઓની રચનાની ખાતરી કરવી આવશ્યક છે;
9) ઇલેક્ટ્રિક ડ્રાઇવની ડિઝાઇનમાં સલામતી અને જાળવણીની સરળતાને ધ્યાનમાં લેવી આવશ્યક છે.

પ્રોડક્શન ફેસિલિટીમાં આડી ટ્રેક લાઇન પર કાર્યરત ગતિ મિકેનિઝમ્સ માટેની સ્થિર ક્ષણ બેરિંગ્સમાં ઘર્ષણ બળને સ્લાઇડ કરીને અને ઓવરહેડ ક્રેનની રેલ પર ફરતા બોગી વ્હીલ્સના રોલિંગ ઘર્ષણ દ્વારા બનાવવામાં આવે છે. ટ્રોલીની આગળની હિલચાલ દરમિયાન મિકેનિઝમની સ્થિર ક્ષણ ક્રેનની લિફ્ટિંગ ક્ષમતા દ્વારા નક્કી કરવામાં આવે છે. બોગીની રિવર્સ હિલચાલ દરમિયાન મિકેનિઝમની સ્થિર ક્ષણની ગણતરી અપૂર્ણ લોડ માટે કરવામાં આવે છે.
ઓવરહેડ ક્રેન્સની ટ્રોલીના ઇલેક્ટ્રિક ડ્રાઇવ માટે, અસુમેળ ખિસકોલી-કેજ રોટર મોટર્સ (સહિત ચલ ફ્રીક્વન્સી ડ્રાઇવના ભાગ રૂપે), ઘાયલ રોટર ઇન્ડક્શન મોટર્સ અને સ્વતંત્ર રીતે ઉત્તેજિત ડીસી મોટર્સ.