લેથ જૂથની મેટલ-કટીંગ મશીનોની મિકેનિઝમ્સની ઇલેક્ટ્રિક મોટર્સની શક્તિની ગણતરી
ઝડપ નિયંત્રણ સાથે ઇલેક્ટ્રિક મોટરની શક્તિની ગણતરી કરતી વખતે, મિકેનિઝમની યાંત્રિક લાક્ષણિકતાઓ ધ્યાનમાં લેવી આવશ્યક છે.
મૂળભૂત ગતિ મિકેનિઝમ માટે, જેમાં બે-ઝોન સ્પીડ કંટ્રોલ લાગુ કરવામાં આવે છે: સતત ટોર્ક અને સતત શક્તિ સાથે, ઇલેક્ટ્રિક મોટરની શક્તિની ગણતરી સૂત્ર દ્વારા કરવામાં આવે છે.
જ્યાં: Mmax — સતત લોડ હેઠળ મહત્તમ પ્રતિકાર અને પુનરાવર્તિત ટૂંકા ગાળાના લોડ હેઠળ મહત્તમ સમકક્ષ પ્રતિકાર; ωn — સતત ટોર્ક ગોઠવણ સાથે મહત્તમ ઝડપ (નજીવા પ્રવાહ દરે).
પાવર ડ્રાઇવ માટે, પાવર મહત્તમ સમકક્ષ ટોર્ક અને મહત્તમ ઝડપના આધારે નક્કી કરવામાં આવે છે. સ્પીડ રેગ્યુલેશનની વિશાળ શ્રેણી સાથે, સ્વતંત્ર વેન્ટિલેશન અથવા બંધ પ્રકાર સાથે ઇલેક્ટ્રિક મોટર્સનો ઉપયોગ કરવાની ભલામણ કરવામાં આવે છે. સ્વ-વેન્ટિલેશન સાથે ઇલેક્ટ્રિક મોટરનો ઉપયોગ કરતી વખતે, ઓછી ઝડપે તેના ઠંડકના બગાડને ધ્યાનમાં લેવું જરૂરી છે.
અનિયંત્રિત એન્જિનો માટે, એક નિયમ તરીકે, S6 મોડમાં કાર્ય કરે છે (જો ચક્ર 10 મિનિટથી વધુ ન હોય તો), પાવર ગણતરી નીચે મુજબ કરવામાં આવે છે.
દરેક ઓપરેશન માટે ઇલેક્ટ્રિક મોટરની શક્તિ સૂત્ર દ્વારા નક્કી કરવામાં આવે છે:

જ્યાં: Pzi, η — અનુક્રમે મશીનની કટિંગ પાવર અને કાર્યક્ષમતા.
લોડ-આશ્રિત કાર્યક્ષમતા અભિવ્યક્તિના આધારે પાવર નુકસાનના આધારે નક્કી કરવામાં આવે છે:

ક્યાં: Pnz — નજીવી કટીંગ પાવર; α અને β — સતત અને ચલ નુકશાન ગુણાંક.
લોડ ફેક્ટરને ધ્યાનમાં લેવું

મશીન કાર્યક્ષમતા
K = 1 કેસ માટે
દરેક લોડ પર કાર્યક્ષમતા નક્કી કરવા માટે નુકસાનનું વિભાજન આપે છે
પ્રાયોગિક ગણતરીઓ માટે પ્રારંભિક સ્વીકારવામાં આવે છે
ટર્નિંગ, મિલિંગ, ડ્રિલિંગ મશીનોની મુખ્ય હિલચાલની ડ્રાઇવ માટે, સતત લોડ હેઠળ કાર્યક્ષમતા 0.7 ... 0.8, ગ્રાઇન્ડીંગ મશીનો માટે 0.8 ... 0.9 છે. મશીનની નિષ્ક્રિય ક્રાંતિ પર ઇલેક્ટ્રિક મોટરની શક્તિ સૂત્ર દ્વારા નક્કી કરવામાં આવે છે:

દરેક સંક્રમણ માટે ઓપરેશનનો સમયગાળો સૂત્ર દ્વારા નક્કી કરવામાં આવે છે:

જ્યાં: l — સંક્રમણ લંબાઈ, mm; S — ફીડ, mm/rev; n — સ્પિન્ડલના પરિભ્રમણની ગતિ, રેવ / મિનિટ.
ભાગને ઇન્સ્ટોલ કરવાનો અને દૂર કરવાનો સમય 1-3 મિનિટ જેટલો છે. દરેક કામગીરી માટે ગણતરી કરેલ શક્તિ અને સમયના આધારે, લોડ ડાયાગ્રામ બનાવવામાં આવે છે અને સમકક્ષ શક્તિ નક્કી કરવામાં આવે છે.

સ્પીડ કંટ્રોલ સાથે ઇલેક્ટ્રિક ડ્રાઇવનો ઉપયોગ કરતી વખતે, પાવરની દ્રષ્ટિએ મોટર પસંદ કરતી વખતે સૌથી ગંભીર ઓપરેટિંગ મોડને ધારવામાં આવે છે, લોડ અને પ્રતિ કલાકની શરૂઆતની આવર્તન બંનેની દ્રષ્ટિએ.
આ કિસ્સામાં, ઇલેક્ટ્રિક મોટરની પ્રારંભિક પસંદગી Kd = 1.1-1.5 ની મર્યાદામાં ગતિશીલતા માટે સલામતી પરિબળ અને સમાવેશની સંભવિત અવધિને ધ્યાનમાં લેતા, સમકક્ષ ટોર્ક અનુસાર હાથ ધરવામાં આવે છે.
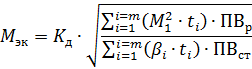
જ્યાં: βi — ગુણાંક કે જે i -th અંતરાલમાં ઇલેક્ટ્રિક મોટરના ઠંડકના બગાડને ધ્યાનમાં લે છે, જ્યારે ઝડપ નજીવી કરતા નીચે જાય છે;
β- સ્થિર આર્મેચરના કિસ્સામાં હીટ ટ્રાન્સફરના બગાડના ગુણાંક; PVR, PVst — સમાવેશની અવધિનું ગણતરી કરેલ અને પ્રમાણભૂત મૂલ્ય.
એન્જિન પાવર ફોર્મ્યુલા દ્વારા નક્કી કરવામાં આવે છે
મોટર, વર્કપીસ અને મશીનના યાંત્રિક ભાગોની જડતાની વાસ્તવિક ક્ષણને ધ્યાનમાં લેતા, ઓવરલોડ અને હીટિંગ ક્ષમતાની તપાસ હાથ ધરવામાં આવે છે.