બહુવિધ સ્થળોએથી ઇલેક્ટ્રિક ડ્રાઇવ નિયંત્રણ યોજનાઓ
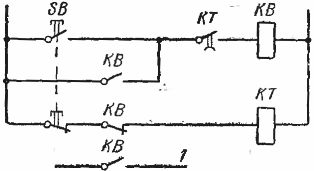
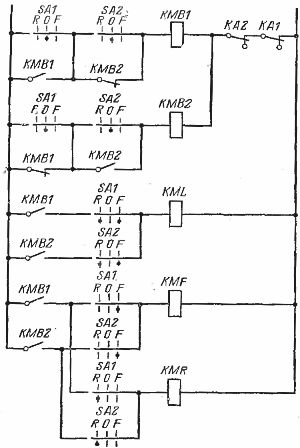
 સતત પ્રક્રિયાની રેખાઓ માટે, જ્યાં ડ્રાઇવ્સ મુખ્યત્વે એક દિશામાં (આગળ) કામ કરે છે અને રિવર્સલ ભાગ્યે જ જોવા મળે છે, બ્રેકર દ્વારા "આગળ" કામગીરી માટે લાઇન કોન્ટેક્ટરના સમાવેશ સાથે સર્કિટ (ફિગ. 1) નો ઉપયોગ કરવાની ભલામણ કરવામાં આવે છે, અને "વિપરીત" કામગીરી માટે — KMR સંપર્કકર્તાના સંપર્કોને સક્રિય કરીને. આ વ્યવસ્થા પસંદગીની દિશામાં ડ્રાઇવ શરૂ કરવાનો સમય ઘટાડે છે.
સતત પ્રક્રિયાની રેખાઓ માટે, જ્યાં ડ્રાઇવ્સ મુખ્યત્વે એક દિશામાં (આગળ) કામ કરે છે અને રિવર્સલ ભાગ્યે જ જોવા મળે છે, બ્રેકર દ્વારા "આગળ" કામગીરી માટે લાઇન કોન્ટેક્ટરના સમાવેશ સાથે સર્કિટ (ફિગ. 1) નો ઉપયોગ કરવાની ભલામણ કરવામાં આવે છે, અને "વિપરીત" કામગીરી માટે — KMR સંપર્કકર્તાના સંપર્કોને સક્રિય કરીને. આ વ્યવસ્થા પસંદગીની દિશામાં ડ્રાઇવ શરૂ કરવાનો સમય ઘટાડે છે.
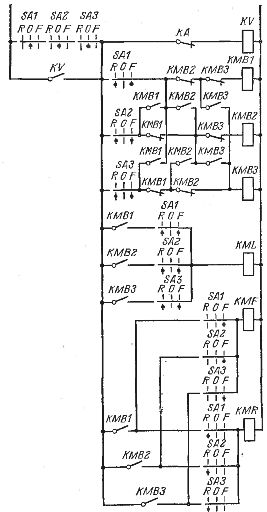
ફિગ માં આકૃતિ. 2 મૂવિંગ ઑબ્જેક્ટમાંથી ઇલેક્ટ્રિક મોટરના રિમોટ રિવર્સિબલ નિયંત્રણને મંજૂરી આપે છે. આ સર્કિટનો ઉપયોગ થાય છે, ઉદાહરણ તરીકે, ક્રેનમાંથી હીટિંગ વેલ કવરના મોટર્સને નિયંત્રિત કરવા માટે. સિગ્નલ સર્કિટ અને વિવિધ સિગ્નલોનું સ્વાગત ફિગમાં બતાવવામાં આવ્યું છે. 3 - 9.
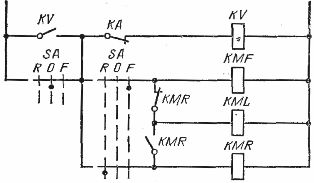
ચોખા. 1. દુર્લભ રીઅર «રીઅર» સાથે રીઅર એન્જિન કંટ્રોલ સ્કીમ.
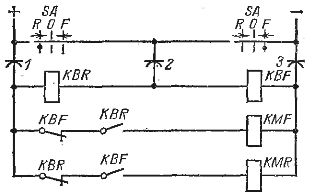
ચોખા. 2. કંટ્રોલ ટ્રોલ દ્વારા મોટરના ઉલટાવી શકાય તેવા નિયંત્રણની યોજના.
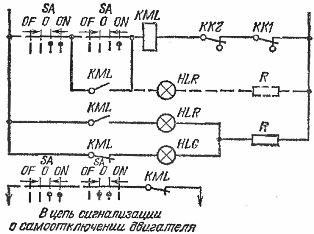
ચોખા. 3. બદલી ન શકાય તેવી ઇલેક્ટ્રિક ડ્રાઇવની સ્થિતિને સંકેત આપવા માટેની યોજના.
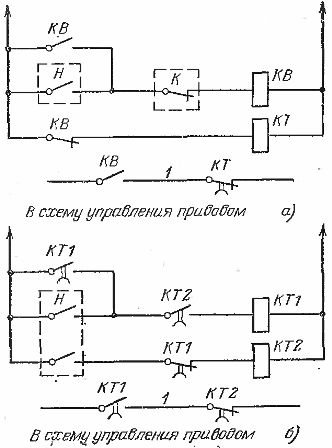
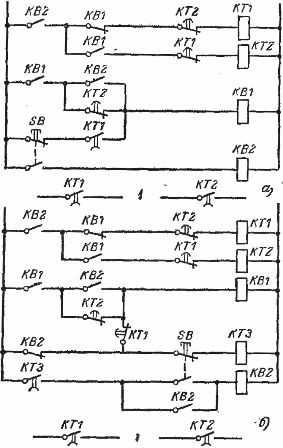
ચોખા. 4.લાંબા (a) અને સ્પંદિત (b) સિગ્નલના સંપર્કમાં આવવાની શરૂઆત પછી સમય વિલંબ સાથે સિગ્નલ પ્રાપ્ત કરવા માટેના સર્કિટ: K — અનલોકિંગ સંપર્ક, 1 — ડ્રાઈવના કંટ્રોલ સર્કિટના સંપર્કો.
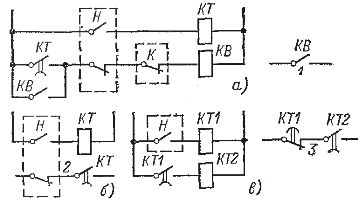
ચોખા. 5. સિગ્નલ H long (a), પલ્સ (b), સમય વિલંબ સાથે પલ્સ (c) ના બીટ (પૂંછડીમાંથી) ના અંત પછી સિગ્નલ પ્રાપ્ત કરવા માટેની યોજનાઓ. K — સંપર્ક અનલૉક, 1, 2, 3 — ડ્રાઇવ કંટ્રોલ સર્કિટના સંપર્કો.
ચોખા. 6. ગૌણ એચની શરૂઆત પછી લાંબા સિગ્નલ પ્રાપ્ત કરવા માટેની યોજના.
ચોખા. 7. સિગ્નલ H (KT1 0.2-0.8 s; KT2 0.3 s; KTZ 0.5 s) ની ગૌણ ક્રિયા પછી સમય વિલંબ સાથે પલ્સ સિગ્નલ પ્રાપ્ત કરવાની યોજના. 1 - ડ્રાઇવ કંટ્રોલ સર્કિટના સંપર્કો.
ચોખા. 8. બટન દબાવવાની અવધિને ધ્યાનમાં લીધા વિના, ચોક્કસ સમયગાળાના સિગ્નલ મેળવવા માટેની યોજના: 1 — ડ્રાઇવ કંટ્રોલ સર્કિટનો સંપર્ક કરો.
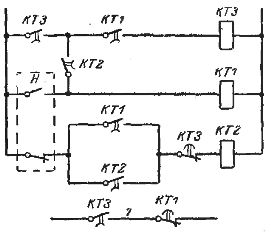
ચોક્કસ સંખ્યાની કામગીરી અથવા ચક્રની ગણતરી કર્યા પછી ડ્રાઇવને આપમેળે અસર કરવા માટે ગણતરી યોજનાઓનો ઉપયોગ કરવામાં આવે છે. તેઓ ક્લોઝર્સ અને ઓપનિંગ્સ (ફિગ. 10), માત્ર બંધ (ફિગ. 11), અથવા માત્ર ઓપનિંગ્સ (ફિગ. 12) ગણી શકે છે.
સૂચવેલ યોજનાઓ અનુસાર કઠોળની ગણતરી ફોટો રિલે સંપર્કો, ગતિ સ્વીચો અથવા અન્ય ઉપકરણોમાંથી પૂરી પાડવામાં આવે છે.
ફિગ માં બતાવેલ ગણતરી યોજનામાં. 10, REV850 રિલેનો ઉપયોગ આર્મેચરના ચુંબકીય "સ્ટીકીંગ" સાથે થાય છે, અને તેથી આ સર્કિટને વોલ્ટેજ સપ્લાયમાં વિક્ષેપ ગણતરીમાં ખલેલ પાડતો નથી. અન્ય કાઉન્ટિંગ સર્કિટ્સમાં, જ્યારે વોલ્ટેજ સપ્લાયમાં વિક્ષેપ આવે છે, ત્યારે પલ્સ કાઉન્ટનું નુકસાન થાય છે.
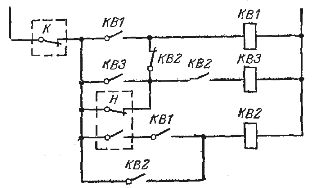
એકાઉન્ટ સ્કીમની માન્યતા તપાસવા માટે (ફિગ. 11), નિયંત્રણ બટનો… જ્યારે પણ તમે SB0N બટન દબાવો છો, ત્યારે સર્કિટ એક ગણતરી કરે છે. SB0F બટનનો ઉપયોગ કાઉન્ટરને રીસેટ કરવા માટે થાય છે.આવા બટનો અન્ય યોજનાઓમાં પણ પ્રદાન કરી શકાય છે.
ચોખા. 9. એક બટનને ક્રમિક રીતે દબાવીને બે અલગ-અલગ સર્કિટમાં સિગ્નલ પ્રાપ્ત કરવા માટેના સર્કિટ: a — સિગ્નલનો સમયગાળો બટન દબાવવાના સમયગાળાની બરાબર છે, b — સિગ્નલનો સમયગાળો બટન દબાવવાની અવધિ પર આધારિત નથી. , 1 — ડ્રાઇવ કંટ્રોલ સર્કિટના સંપર્કો.
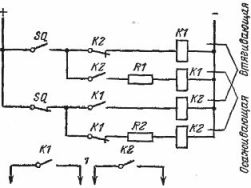
ચોખા. 10. બે સુધીના ખાતાની યોજના.
દરેક નંબર માટે કઠોળ એક બંધ અને મર્યાદા સ્વીચ SQ ના સંપર્કની એક શરૂઆત છે; 1 - ડ્રાઇવ કંટ્રોલ સર્કિટના સંપર્કો.
અંજીરના સર્કિટમાં કઠોળની ગણતરી. 11, 12 એ SQ સંપર્કના ટૂંકા ગાળાના બંધ (ઓપનિંગ) છે, અને આ સંપર્કની બંધ સ્થિતિ ઇમ્પલ્સ કોન્ટેક્ટર KNA અને એક રિલે KB (KL) ચાલુ કરવા માટે પૂરતી હોવી જોઈએ.
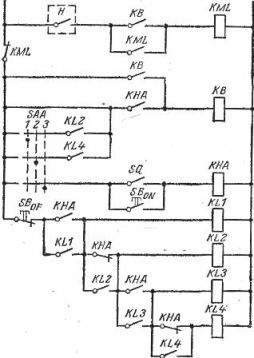
ચોખા. 11. જ્યારે સંપર્ક SQ બંધ હોય ત્યારે ત્રણ સુધીની ગણતરી માટેની યોજના.
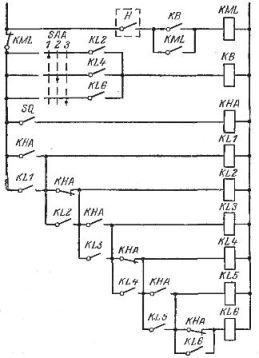
ચોખા. 12. SQ કોન્ટેક્ટ ખોલતી વખતે ત્રણ સુધી ગણવા માટેની સ્કીમ
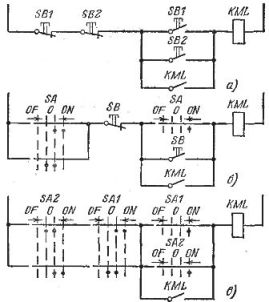
ચોખા. 13. એન્જિનના બે જગ્યાએથી બદલી ન શકાય તેવા નિયંત્રણની યોજનાઓ: a — બે બટનો સાથે, b — એક બટન અને કી સાથે, c — બે કી સાથે.
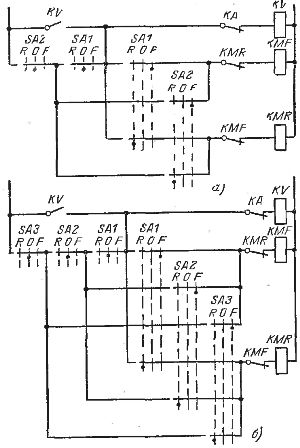
ચોખા. 14. બે જગ્યાએથી ઇલેક્ટ્રિક ડ્રાઇવના એકતરફી આશ્રિત ઉલટાવી શકાય તેવા નિયંત્રણની યોજના.
ગણતરી KML લાઇન સંપર્કકર્તા દ્વારા ફરીથી સેટ કરવામાં આવે છે; SQ સંપર્કકર્તાનો બંધ સમય KML સંપર્કકર્તાના સમય કરતાં ઓછો હોવો જોઈએ.
થોડી મોટી સંખ્યા માટે ગણતરી યોજનાઓ ઉપરોક્ત યોજનાઓ સાથે સામ્યતા દ્વારા દોરવામાં આવી શકે છે, પરંતુ જ્યારે ગણતરી પાંચ કે આઠ કરતા વધુ હોય અથવા જ્યારે વોલ્ટેજ અદૃશ્ય થઈ જાય ત્યારે ગણતરીની ખોટ અસ્વીકાર્ય હોય તેવા કિસ્સામાં ક્રમાંકિતનો ઉપયોગ કરવાની ભલામણ કરવામાં આવે છે. રિલે
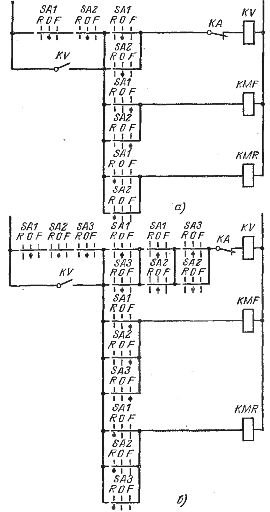
ચોખા. 15. આશ્રિત ઉલટાવી શકાય તેવા એન્જિન નિયંત્રણની યોજનાઓ: a — બે જગ્યાએથી, b — ત્રણ જગ્યાએથી
પ્રકાર E-526 મોટર સ્ટેપ કાઉન્ટ રિલે 30 કાઉન્ટ્સ સુધી અથવા પ્રકાર E 531 પલ્સ કાઉન્ટ રિલે 75 પલ્સ કાઉન્ટ્સ સુધીનો ઉપયોગ કરી શકાય છે. રિલે વૈકલ્પિક પ્રવાહ પર કાર્ય કરે છે અને તેમના સંપર્કો અનુક્રમે 220 V પર પાવર-ઓફ સક્ષમ કરે છે. અને ડીસી 50 અને 30 વોટ.
વિવિધ સ્થળોએથી ઇલેક્ટ્રિક મોટર્સના નિયંત્રણ સર્કિટ આશ્રિત, દિશાવિહીન અને સ્વતંત્ર હોઈ શકે છે (ફિગ. 13). મોટેભાગે, આશ્રિત નિયંત્રણ યોજનાઓનો ઉપયોગ (ફિગ. 15) સૌથી સરળ તરીકે થાય છે. આ યોજનાઓ અનુસાર, કોઈપણ નિયંત્રણ ઉપકરણનું સંચાલન કરતી વખતે, અન્ય ઉપકરણના હેન્ડલને શૂન્યથી ઑપરેટિંગ સ્થિતિમાં ખસેડવાથી મોટર બંધ થઈ જાય છે.
બે (ફિગ. 14) અને ત્રણ (ફિગ. 16) સ્થાનોથી વન-વે આશ્રિત નિયંત્રણની યોજનાઓ અનુસાર, સ્વીચ SA1 ને સ્વિચ SA2 (SA2 અને SA3) ની સ્થિતિથી સ્વતંત્ર રીતે નિયંત્રિત કરી શકાય છે. જ્યારે SA1 સ્વીચ શૂન્ય સ્થિતિમાં હોય અને SA3 સ્વીચની સ્થિતિ પર નિર્ભર ન હોય ત્યારે SA2 સ્વીચનું નિયંત્રણ શક્ય છે. જ્યારે SA1 અને SA2 સ્વીચો શૂન્ય સ્થિતિમાં હોય ત્યારે SA3 સ્વીચોનું નિયંત્રણ શક્ય છે.
આકૃતિ 16. ત્રિ-સ્થાન પરસ્પર મોટરના દિશાહીન આશ્રિત નિયંત્રણની યોજનાકીય
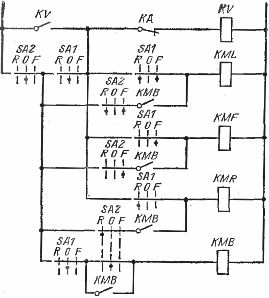
ચોખા. 17. બે જગ્યાએથી એન્જિનના સ્વતંત્ર ઉલટાવી શકાય તેવા નિયંત્રણની યોજના.
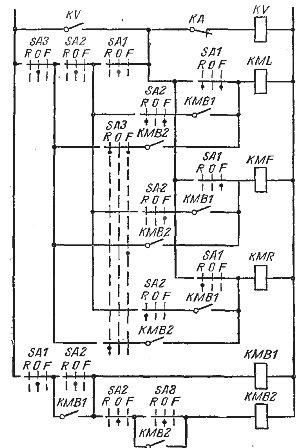
ચોખા. 18. ત્રણ જગ્યાએથી એન્જિનના સ્વતંત્ર ઉલટાવી શકાય તેવા નિયંત્રણની યોજના.
સ્વતંત્ર નિયંત્રણ યોજનાઓમાં (અંજીર 17 અને 18), જ્યારે ડ્રાઇવને કોઈપણ પ્રથમ સ્વીચ (SA1, SA2 અથવા SA3) દ્વારા નિયંત્રિત કરવામાં આવે છે, ત્યારે અન્ય સ્વીચના હેન્ડલને ખસેડવાથી ડ્રાઇવના સંચાલનને અસર થતી નથી. પ્રથમ કીના હેન્ડલની શૂન્ય સ્થિતિ પર પાછા ફર્યા પછી, બીજી કી (અથવા અન્ય બે) ના હેન્ડલની સ્થિતિને ધ્યાનમાં લીધા વિના એક્ટ્યુએટર બંધ થઈ જશે. બીજી કી (અથવા અન્ય બે) ને શૂન્ય સ્થિતિમાં પરત કર્યા પછી જ નવી શરૂઆત શક્ય છે.
ઘણી વાર તેઓ એક સરળ યોજના (ફિગ. 19) અનુસાર બે અને ત્રણ જગ્યાએથી ડ્રાઇવ નિયંત્રણનો ઉપયોગ કરે છે; આનો અર્થ એ છે કે માત્ર એક જ પ્રથમ સ્થાનથી પ્રેફરન્શિયલ નિયંત્રણ (કી SA1). જ્યારે ડ્રાઇવને બીજી સ્વીચ (SA2 અથવા SA3) દ્વારા નિયંત્રિત કરવામાં આવે છે, ત્યારે પ્રથમ સ્વીચના હેન્ડલને શૂન્ય સ્થિતિમાંથી ખસેડવાથી નિયંત્રણ તે સ્વીચમાં સ્થાનાંતરિત થાય છે.
ચોખા. 19. ઉલટાવી શકાય તેવી ઇલેક્ટ્રિક ડ્રાઇવને નિયંત્રિત કરવા માટેની સરળ યોજનાઓ: a — બે જગ્યાએથી, b — ત્રણ જગ્યાએથી.