નિયંત્રણ યોજનાઓ ડિઝાઇન કરવા માટે એક સાહજિક પદ્ધતિ
 સાહજિક પદ્ધતિ - વિવિધ મિકેનિઝમ્સના ઓટોમેશનમાં વિવિધ ડિઝાઇન સંસ્થાઓમાં મેળવેલા અનુભવના આધારે નિયંત્રણ યોજનાઓ વિકસાવવાની પદ્ધતિ. તે ડિઝાઇનરની ઇજનેરી અંતર્જ્ઞાન પર આધારિત છે.
સાહજિક પદ્ધતિ - વિવિધ મિકેનિઝમ્સના ઓટોમેશનમાં વિવિધ ડિઝાઇન સંસ્થાઓમાં મેળવેલા અનુભવના આધારે નિયંત્રણ યોજનાઓ વિકસાવવાની પદ્ધતિ. તે ડિઝાઇનરની ઇજનેરી અંતર્જ્ઞાન પર આધારિત છે.
ફક્ત એક જ જેણે અગાઉના તમામ અનુભવોને ગ્રહણ કર્યા છે અને યોજનાઓ દોરવાની દ્રષ્ટિએ ચોક્કસ ક્ષમતાઓ ધરાવે છે, જે અમૂર્ત રીતે વિચારી શકે છે અને તાર્કિક રીતે તર્ક આપી શકે છે, તે આ પદ્ધતિમાં સંપૂર્ણ રીતે નિપુણતા મેળવી શકે છે. તેની જટિલતા હોવા છતાં, મોટાભાગના વિદ્યુત ડિઝાઇનરો સાહજિક પદ્ધતિનો વ્યાપકપણે ઉપયોગ કરે છે.
ઉદાહરણ તરીકે, પુશ લીવર (ફિગ. 1) ના સરળ કિનેમેટિક ડાયાગ્રામને ધ્યાનમાં લો. જ્યારે વ્હીલ 5 ઘડિયાળની દિશામાં ફરે છે, ત્યારે લીવર 4 લીવર 1 ને અક્ષ O ની આસપાસ ફેરવે છે, તેથી લીવર 2 સાથે જૂતા 3 ને અનુવાદ કરવા દબાણ કરે છે. વ્હીલ 5 ના વધુ પરિભ્રમણ સાથે, લીવર 1 ની હિલચાલની દિશા બદલાય છે અને જૂતા તેની મૂળ સ્થિતિ પર પાછા ફરે છે, જેના પછી એન્જિન બંધ થવું જોઈએ.
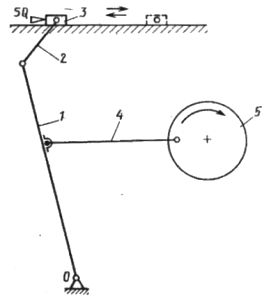
ચોખા. 1. લીવર પુશર કંટ્રોલનું સ્કીમેટિક ડાયાગ્રામ
માનવામાં આવેલ મિકેનિઝમ એ પુશિંગ ડિવાઇસનું લાક્ષણિક પ્રતિનિધિ છે.પ્રથમ ચક્રમાં, મિકેનિઝમ ચાલુ છે અને ચાલી રહ્યું છે. બીજા માપમાં તે કામ કરતું નથી. જે ચક્રમાં મિકેનિઝમ કામ કરતું નથી તેને શૂન્ય કહેવાય છે. જો કે જૂતા સંપૂર્ણ રીતે પારસ્પરિક (આગળ અને પાછળ) હોય છે, તેમ છતાં બિન-ઉલટાવી શકાય તેવી ઇલેક્ટ્રિક મોટરનો ઉપયોગ પ્રોપલ્શન માટે કરી શકાય છે.
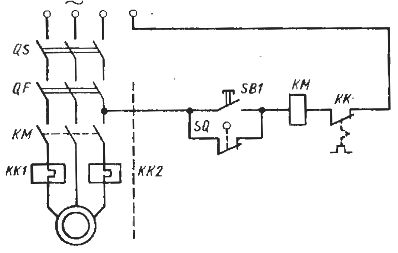
લીવર-પિસ્ટન ઇલેક્ટ્રિક મોટરના કંટ્રોલ સર્કિટમાં બે ભાગો હોય છે (ફિગ. 1 માં તેઓ ડોટેડ લાઇન દ્વારા અલગ પડે છે): પાવર સર્કિટ અને કંટ્રોલ સર્કિટ.
પાવર સર્કિટના તત્વોના હેતુને ધ્યાનમાં લો. ક્યુએસ સ્વીચને ત્રણ-તબક્કાનો પ્રવાહ પૂરો પાડવામાં આવે છે, જે ચુંબકીય સ્ટાર્ટરને સમારકામ અથવા નુકસાનની સ્થિતિમાં ઇલેક્ટ્રિક મોટરને વીજ પુરવઠો કાપી નાખે છે. પછી પ્રવાહ સર્કિટ બ્રેકરમાંથી વહે છે જેનું QF પ્રકાશન રેખાકૃતિમાં બતાવવામાં આવ્યું છે. તે શોર્ટ સર્કિટ કરંટના કિસ્સામાં ડ્રાઇવને પાવર સપ્લાયને સુરક્ષિત કરવા અને ડિસ્કનેક્ટ કરવા માટે રચાયેલ છે. ચુંબકીય સ્ટાર્ટર KM ના મુખ્ય સંપર્કો ઇલેક્ટ્રિક મોટર M ના વિન્ડિંગને ચાલુ અથવા બંધ કરે છે.
થર્મલ રિલે KK1 અને KK2, જેનાં હીટિંગ એલિમેન્ટ્સ પાવર સર્કિટ્સમાં બતાવવામાં આવે છે, તે ઇલેક્ટ્રિક મોટરને લાંબા સમય સુધી ઓવરલોડથી બચાવવા માટે રચાયેલ છે:
નિયંત્રણ યોજના નીચે મુજબ કાર્ય કરે છે. જ્યારે તમે સ્ટાર્ટ બટન SB1 દબાવો છો, ત્યારે ચુંબકીય સ્ટાર્ટર KM ની કોઇલ ઊર્જાવાન થાય છે અને તેથી KM ના સપ્લાય સર્કિટના સંપર્કો બંધ થઈ જાય છે અને મોટર વિન્ડિંગમાં ઇલેક્ટ્રિક પ્રવાહ પ્રવેશે છે. મોટર રોટર ફેરવાય છે અને ડ્રમ આગળ વધવાનું શરૂ કરે છે. તે જ સમયે, તે લિમિટ સ્વીચ SQ ના લિવરથી દૂર ખસે છે અને તેના સંપર્કો બંધ છે.
જ્યારે સ્ટાર્ટ બટન SB1 રિલીઝ થાય છે અને તેના સંપર્કો ખુલે છે, ત્યારે ચુંબકીય સ્ટાર્ટરની KM કોઇલ લિમિટ સ્વીચ SQ ના સંપર્કો દ્વારા પાવર પ્રાપ્ત કરશે.આગળ વધ્યા પછી, અને પછી પાછળ, પિસ્ટન લિમિટ સ્વીચ SQ ના લીવરને દબાવશે, તેના સંપર્કો ખુલશે અને KM ની કોઇલ બંધ થઈ જશે. આનાથી પાવર સર્કિટમાં KM સંપર્કો ખુલશે અને ઇલેક્ટ્રિક મોટર બંધ થશે.
માનવામાં આવેલ સર્કિટમાં પાવર અને કંટ્રોલ સર્કિટ હોય છે. ભવિષ્યમાં, ફક્ત નિયંત્રણ યોજનાઓ ધ્યાનમાં લેવામાં આવશે.
કાર્ય દ્વારા, એટલે કે. હેતુ દ્વારા, સર્કિટના સંચાલનમાં સામેલ તમામ ઘટકોને ત્રણ જૂથોમાં વિભાજિત કરી શકાય છે: નિયંત્રણ સંપર્કો, મધ્યવર્તી તત્વો અને એક્ઝિક્યુટિવ તત્વો.
કંટ્રોલ કોન્ટેક્ટ એ એવા તત્વો છે કે જેની સાથે આદેશો જારી કરવામાં આવે છે (નિયંત્રણ બટનો, સ્વીચો, મર્યાદા સ્વીચો, પ્રાથમિક કન્વર્ટર, રિલે સંપર્કો, વગેરે).
મધ્યવર્તી તત્વોનું નામ સૂચવે છે કે તેઓ નિયંત્રણ અને એક્ઝિક્યુટિવ તત્વો વચ્ચે મધ્યવર્તી સ્થાન ધરાવે છે. રિલે-સંપર્ક સર્કિટ્સમાં, તેમાં સમય રિલે અને મધ્યવર્તી રિલે અને બિન-સંપર્ક સર્કિટમાં - તર્કના દરવાજા.
એક્ઝિક્યુટિવ તત્વો એક્ઝિક્યુટિવ મિકેનિઝમ છે. જો કે, કંટ્રોલ સર્કિટ વિકસાવતી વખતે, ડ્રાઇવ મિકેનિઝમ્સ પોતે (ઇલેક્ટ્રિક મોટર્સ અથવા હીટિંગ એલિમેન્ટ્સ) નો ઉપયોગ કરવામાં આવતો નથી, પરંતુ ઉપકરણો કે જેમાં તેનો સમાવેશ થાય છે, એટલે કે. મેગ્નેટિક સ્ટાર્ટર, કોન્ટેક્ટર્સ વગેરે.
તમામ નિયંત્રણ સંપર્કો, તેમના કાર્યાત્મક સિદ્ધાંત અનુસાર, પાંચ પ્રકારોમાં વહેંચાયેલા છે: ટૂંકી ક્રિયા (પીસી) સાથે સંપર્ક શરૂ કરો, લાંબી ક્રિયા (પીડી) સાથે સંપર્ક શરૂ કરો, ટૂંકી ક્રિયા સાથે સંપર્ક બંધ કરો (ઓકે), લાંબી ક્રિયા સાથે સંપર્ક બંધ કરો (ઓડી) ), સ્ટાર્ટ-સ્ટોપ સંપર્ક (સોફ્ટવેર). આ સંપર્કોને મુખ્ય કહેવામાં આવે છે.
ચક્રીય મિકેનિઝમ્સના નિયંત્રણમાં તમામ લાક્ષણિક સંપર્કોના સંચાલનના સાયક્લોગ્રામ્સ ફિગમાં બતાવવામાં આવ્યા છે. 2.
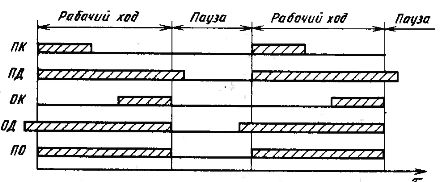
ચોખા. 2.નિયંત્રણ સંપર્કોનો સાયક્લોગ્રામ
પાંચ સંપર્કોમાંથી દરેક કામ કરવાનું શરૂ કરે છે (બંધ થાય છે) અને સમયની ચોક્કસ ક્ષણો પર સમાપ્ત થાય છે (ખુલી જાય છે). તેથી, પ્રારંભિક સંપર્કો કાર્યકારી સ્ટ્રોકની શરૂઆત સાથે તેમનું કાર્ય એકસાથે શરૂ કરે છે, પરંતુ YAK સંપર્ક કાર્યકારી સ્ટ્રોક દરમિયાન કામ કરવાનું બંધ કરે છે, OD — વિરામ દરમિયાન, એટલે કે, તેઓ ફક્ત સ્વિચ ઓફ થવાની ક્ષણો પર એકબીજાથી અલગ પડે છે ( ઉદઘાટન).
સંપર્કો બંધ કરવા, જે, સંપર્કો શરૂ કરતા વિપરીત, કાર્યકારી સ્ટ્રોકના અંતની જેમ જ કામ કરવાનું બંધ કરે છે, સમાવેશની ક્ષણોમાં અલગ પડે છે (બંધ). સ્ટોપ કોન્ટેક્ટ ઓકે વર્કિંગ સ્ટ્રોક દરમિયાન તેની કામગીરી શરૂ કરે છે, અને સંપર્ક OD - વિરામ દરમિયાન. માત્ર સોફ્ટવેરનો સંપર્ક વર્કિંગ કોર્સની શરૂઆત સાથે તેનું કામ શરૂ કરે છે અને તેના અંત સાથે સમાપ્ત થાય છે.
પાંચ મુખ્ય સંપર્કોની મદદથી, એક્ઝિક્યુટિવ અને મધ્યવર્તી તત્વોને નિયંત્રિત કરવા માટે ચાર યોજનાઓ પ્રાપ્ત કરવી શક્ય છે, જેને લાક્ષણિક યોજનાઓ (ફિગ. 3) કહેવામાં આવે છે.

ચોખા. 3. એક્ઝિક્યુટિવ અને મધ્યવર્તી સર્કિટ માટે લાક્ષણિક નિયંત્રણ યોજનાઓ
પ્રથમ લાક્ષણિક સર્કિટ (ફિગ. 3, એ) માં માત્ર એક સોફ્ટવેર નિયંત્રણ સંપર્ક છે. જો તે બંધ હોય, તો વિદ્યુત પ્રવાહ એક્ટ્યુએટર X દ્વારા વહે છે, અને જો તે ખુલ્લું હોય, તો કોઈ પ્રવાહ વહેતો નથી. PO સંપર્કનો પોતાનો અર્થ છે અને અન્ય તમામ સંપર્કોનો ઉપયોગ જોડીમાં (પ્રારંભ અને બંધ) થવો જોઈએ.
બીજા લાક્ષણિક સર્કિટમાં સતત ક્રિયા સાથે બે નિયંત્રણ સંપર્કો છે: પીડી અને ઓડી (ફિગ. 3, બી).
ત્રીજા લાક્ષણિક સર્કિટમાં કોમ્પ્યુટરનો સ્ટાર્ટ કોન્ટેક્ટ અને સ્ટોપ કોન્ટેક્ટ ઓડીનો સમાવેશ થાય છે, કંટ્રોલ કોન્ટેક્ટ્સ ઉપરાંત, આ સર્કિટમાં બ્લોકીંગ કોન્ટેક્ટ xનો સમાવેશ થવો જોઈએ, જેના દ્વારા એક્ટ્યુએટર Xને સંપર્ક શરૂ થયા પછી પાવર મળતો રહેશે. કમ્પ્યુટર ખોલવામાં આવે છે (ફિગ. 3, સી).
ચોથી લાક્ષણિક યોજના બે ટૂંકા ગાળાના સંપર્કો પર આધારિત છે: કમ્પ્યુટર શરૂ કરો અને ઓકે બંધ કરો, સમાંતરમાં જોડાયેલ (ફિગ. 3, ડી).
આપેલ ચાર લાક્ષણિક યોજનાઓ (જેમ કે સમઘનમાંથી) સંપર્કોને નિયંત્રિત કરવા માટે જટિલ સમાંતર-સીરીયલ યોજનાઓ બનાવવાની મંજૂરી આપે છે. તેથી, ઉદાહરણ તરીકે, વિચારણા હેઠળ લીવર નિયંત્રણ યોજના (જુઓ. ફિગ. 1) ચોથી લાક્ષણિક યોજના પર આધારિત છે. તે ટૂંકા ગાળાના સ્ટાર્ટ કોન્ટેક્ટ તરીકે SB1 પુશ બટન્સ અને ટૂંકા ગાળાના સ્ટોપ કોન્ટેક્ટ તરીકે SQ લિમિટ સ્વિચનો ઉપયોગ કરે છે.
સાહજિક પદ્ધતિનો ઉપયોગ કરીને નિયંત્રણ યોજના બનાવતી વખતે, નિયંત્રણ સંપર્કના પ્રકારને યોગ્ય રીતે નિર્ધારિત કરવું જરૂરી છે, એટલે કે, તેની ક્રિયાની અવધિ.
લાક્ષણિક યોજનાઓનો ઉપયોગ કરીને સાહજિક પદ્ધતિનો ઉપયોગ કરીને નિયંત્રણ યોજના વિકસાવવાનું ઉદાહરણ ધ્યાનમાં લો.
ઇન્ડક્ટરને નિયંત્રિત કરવા માટે અર્ધ-સ્વચાલિત ઉપકરણ અને ઉચ્ચ-આવર્તન પ્રવાહો સાથે ઉત્પાદનને ગરમ કરવા અને પછી તેને પાણીના જેટથી ઠંડુ કરવા માટે રચાયેલ ઇન્સ્ટોલેશનને છંટકાવ કરવા માટે ઉપકરણ વિકસાવવાનું જરૂરી છે. ઇન્ડક્ટરમાં પ્રોડક્ટ ગરમ કરવાનો સમય 12 સેકન્ડ છે અને ઠંડકનો સમય 8 કલાક છે. પ્રોડક્ટ ઇન્ડક્ટરમાં મેન્યુઅલી ઇન્સ્ટોલ કરવામાં આવે છે.
પ્રથમ, અમે અર્ધ-સ્વચાલિત ઉપકરણના સંચાલનનું વિશ્લેષણ કરીશું અને તમામ એક્ઝિક્યુટિવ અને મધ્યવર્તી તત્વો નક્કી કરીશું. કાર્યકર મેન્યુઅલી ઉત્પાદનને ઇન્ડક્ટરમાં ઇન્સ્ટોલ કરે છે અને સ્ટાર્ટ બટન દબાવશે.આ બિંદુએ, ઇન્ડક્ટર ચાલુ થાય છે અને ઉત્પાદનની ગરમી શરૂ થાય છે. તે જ સમયે, ગરમીનો સમય (12 સે) ધ્યાનમાં લેતા, સમય રિલે પણ ચાલુ થવો જોઈએ.
આ વખતે રિલે (વધુ સ્પષ્ટ રીતે, તેના સંપર્કો) ઇન્ડક્ટરને બંધ કરે છે અને સ્પ્રિંકલર ચાલુ કરે છે, જે ઠંડક માટે પાણી પૂરું પાડે છે. તે જ સમયે, ઠંડકના સમયની ગણતરી કરવા માટે, એટલે કે, સ્પ્રેયરને બંધ કરવા માટે બીજી રિલે ચાલુ કરવી આવશ્યક છે. આ રીતે, ચાર ઘટકોને નિયંત્રિત કરવું જરૂરી છે: ઇન્ડક્ટર, સ્પ્રે ડિવાઇસ અને બે ટાઇમ રિલે.
ઇન્ડક્ટરને કોન્ટેક્ટર દ્વારા ચાલુ અને બંધ કરવામાં આવે છે, જેના કારણે બાદમાં નિયંત્રિત કરવું જરૂરી છે. સ્પ્રેયરને સોલેનોઇડ વાલ્વ દ્વારા નિયંત્રિત કરવામાં આવે છે.
ચાલો સંપર્કકર્તા KM1 ની કોઇલ (કોઇલ), સોલેનોઇડ વાલ્વ KM2 ની કોઇલ અને સમયના કોઇલ KT1 અને K.T2 અનુક્રમે નિયુક્ત કરીએ. આમ, અમારી પાસે બે એક્ટ્યુએટર છે: KM1 અને KM2 અને બે મધ્યવર્તી તત્વો: KT1 અને KT2.
હાથ ધરવામાં આવેલા વિશ્લેષણમાંથી, તે અનુસરે છે કે હીટિંગ પ્રથમ શરૂ થવી જોઈએ, એટલે કે, કોઇલ KM1 ઉત્સાહિત થશે. SB ટ્રિગર બટન (ટૂંકી ક્રિયા) નો ઉપયોગ પ્રારંભ સંપર્ક તરીકે થાય છે. આમ, ત્રીજી કે ચોથી લાક્ષણિક યોજના લાગુ પડે છે.
ઇન્ડક્ટરને સમય રિલે KT1.1 ના સંપર્કોથી ડિસ્કનેક્ટ થવા દો, જે આ કિસ્સામાં લાંબા-અભિનય સંપર્કો છે. તેથી, અમે ત્રીજી લાક્ષણિક યોજના પસંદ કરીએ છીએ. ચુંબકીય સ્ટાર્ટર KM1 ના વિન્ડિંગ સાથે, સમય રિલે KT1 ચાલુ કરવું જરૂરી છે, જે તેમને સમાંતરમાં કનેક્ટ કરીને કરવું ખૂબ જ સરળ છે.
પરિણામી સર્કિટની કામગીરીને ધ્યાનમાં લો (ફિગ. 4, એ).
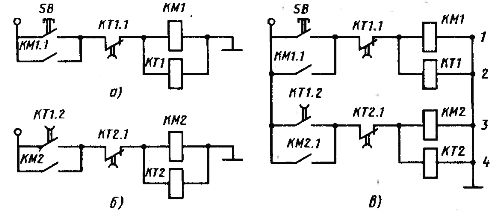
ચોખા. 4.કંટ્રોલ સર્કિટ: a — ઇન્ડક્ટર અને હીટિંગ ટાઈમ માટે રિલે, b — સ્પ્રિંકલર ડિવાઈસ અને રિલે કૂલિંગ ટાઈમ, c — એકંદરે ઇન્સ્ટોલેશન
જ્યારે તમે સ્ટાર્ટ બટન SB દબાવો છો, ત્યારે કોન્ટેક્ટર KM1 ની કોઇલ એનર્જાઈઝ થાય છે, એટલે કે ઉત્પાદનનું હીટિંગ શરૂ થાય છે. તે જ સમયે, સમય રિલે KT1 ની કોઇલ સક્રિય થાય છે અને હીટિંગ સમયની ગણતરી કરવાનું શરૂ કરે છે. બ્લોકીંગ કોન્ટેક્ટ KM1.1 ની મદદથી, ટ્રિગર બટન SB ને રીલીઝ કર્યા પછી પણ KM1 ની કોઇલનું વોલ્ટેજ જાળવવામાં આવશે, એટલે કે. તેના સંપર્કો ખોલ્યા પછી.
હીટિંગ સમય સમાપ્ત થયા પછી, સમય રિલે KT1 કામ કરશે, તેનો સંપર્ક KT1.1 ખુલશે. આનાથી KM1 કોઇલ બંધ થશે (ઉત્પાદનનું ગરમી સમાપ્ત થશે). સ્પ્રેયર હવે ચાલુ હોવું જોઈએ. તે સંપર્ક બંધ કરીને સમય રિલે KT1 દ્વારા ચાલુ કરી શકાય છે. જ્યારે સ્પ્રેયર ચાલુ હોય, ત્યારે સમય રિલે KT1 બંધ થાય છે. તેથી, બંધ સંપર્ક KT1.1 ટૂંકા ગાળાનો સંપર્ક હશે. તેથી, અમે ફરીથી ત્રીજી લાક્ષણિક યોજનાનો ઉપયોગ કરીશું.
તે જ સમયે સ્પ્રેયર સાથે, સમય રિલે KT2 ચાલુ કરવું જરૂરી છે, જે ઠંડકના સમયની ગણતરી કરે છે. આ હેતુ માટે, અમે એપ્લાઇડ ટેકનિકનો ઉપયોગ કરીશું અને ટાઇમ રિલે KT2 ની કોઇલને KM2 સાથે સમાંતરમાં જોડીશું. આમ આપણને બીજી નિયંત્રણ યોજના મળે છે (ફિગ. 4, બી). બે સર્કિટ (ફિગ. 4, a અને b) ને જોડીને, અમને સામાન્ય નિયંત્રણ યોજના (ફિગ. 4, c) મળે છે.
ચાલો હવે સમગ્ર સર્કિટની કામગીરીને ધ્યાનમાં લઈએ (ફિગ. 4, c). જ્યારે તમે SB સ્ટાર્ટ બટન દબાવો છો, ત્યારે કોન્ટેક્ટર KM1 અને ટાઇમ રિલે KT1 ની કોઇલ એનર્જાઈઝ થાય છે અને પ્રોડક્ટ ગરમ થવા લાગે છે.12 સેકન્ડ પછી, સમય રિલે KT1 કાર્ય કરશે અને સર્કિટ 1 માં તેના સંપર્કો ખુલશે અને સર્કિટ 2 માં બંધ થશે. ઉત્પાદન ઠંડુ થવાનું શરૂ થશે. સોલેનોઇડ વાલ્વની કોઇલ KM2 સાથે સાથે, સમય રિલે K ઠંડકના સમયની ગણતરી કરીને, T2 ને એનર્જીકૃત કરવામાં આવશે. જ્યારે સંપર્ક KT2.1 (સર્કિટ 3) ખુલે છે, ત્યારે વાલ્વ KM2 અને સમય રિલે KT2 બંધ થાય છે, અને સર્કિટ તેની મૂળ સ્થિતિમાં પરત આવે છે.
પરિણામી ઇન્ડક્ટર અને સ્પ્રિંકલર નિયંત્રણ યોજના સાહજિક પદ્ધતિનો ઉપયોગ કરીને વિકસાવવામાં આવી હતી. જો કે, આ યોજના સાચી અને શ્રેષ્ઠ હશે તેવા કોઈ પુરાવા નથી. સર્કિટની કાર્યક્ષમતાનો પ્રશ્ન તેના ઉત્પાદન અને કાળજીપૂર્વક પ્રાયોગિક ચકાસણી પછી જ ઉકેલી શકાય છે. સાહજિક પદ્ધતિની આ ચોક્કસપણે સૌથી મોટી ખામી છે. વિશ્લેષણાત્મક પદ્ધતિમાં નોંધાયેલ ખામી ગેરહાજર છે. નિયંત્રણ યોજનાઓ વિકસાવવા માટેની વિશ્લેષણાત્મક પદ્ધતિની ચર્ચા હવે પછીના લેખમાં કરવામાં આવશે.