ગતિના કાર્ય તરીકે મોટર નિયંત્રણ સર્કિટ
 મોટર કંટ્રોલમાં, સ્પીડને મોટર રોટર સ્પીડના ફંક્શન તરીકે મોનિટર કરવામાં આવે છે જેથી તે બદલાતા નિયંત્રણ તત્વોને પ્રભાવિત કરે.
મોટર કંટ્રોલમાં, સ્પીડને મોટર રોટર સ્પીડના ફંક્શન તરીકે મોનિટર કરવામાં આવે છે જેથી તે બદલાતા નિયંત્રણ તત્વોને પ્રભાવિત કરે.
મોટર સ્ટાર્ટિંગ કંટ્રોલ સર્કિટમાં સ્પીડ કંટ્રોલ રિલે અથવા નાના માપન ઇલેક્ટ્રિક જનરેટરનો ઉપયોગ કરી શકાય છે. જો કે, ડિઝાઇનની જટિલતા, ઊંચી કિંમત અને અપૂરતી વિશ્વસનીયતાને કારણે આ હેતુઓ માટે તેઓ અત્યંત ભાગ્યે જ ઉપયોગમાં લેવાય છે. તેથી, એન્જિનની ગતિ પરોક્ષ પદ્ધતિઓ દ્વારા નિયંત્રિત થાય છે. અસુમેળ અને સિંક્રનસ મોટર્સમાં, રોટેશનલ ફ્રિક્વન્સી રોટર કરંટની ઇએમએફ અને આવર્તન દ્વારા નિયંત્રિત થાય છે, અને સીધી વર્તમાન મોટર્સમાં આર્મેચર ઇએમએફ દ્વારા નિયંત્રિત થાય છે.
અંજીરમાં. 1, a અને b સમાંતર-ઉત્તેજિત ડીસી મોટરને રોટેશનની આવર્તનના આધારે અને શરૂઆતના સમયથી EMF અને આર્મેચર વોલ્ટેજ પર આધાર રાખીને સ્વચાલિત શરૂઆત માટેની યોજનાઓ દર્શાવે છે. પરિભ્રમણ આવર્તનનું નિયંત્રણ મોટરના EMF ને માપવા દ્વારા હાથ ધરવામાં આવે છે, જે પરિભ્રમણ આવર્તનના પ્રમાણમાં બદલાય છે.
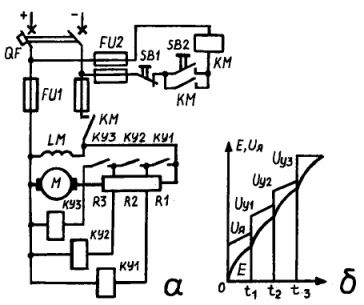
ચોખા. 1.ગતિના કાર્ય તરીકે નિયંત્રણ સર્કિટ: a અને b — સમાંતર-ઉત્તેજિત ડીસી મોટરનું સર્કિટ અને પ્રારંભિક રેખાકૃતિ
EMF એ એન્જિનની ગતિના પ્રમાણસર હોવાથી, પ્રારંભિક રિઓસ્ટેટના વ્યક્તિગત તબક્કાઓનું સ્વચાલિત ઇનપુટ KM1, KM2 અને KMZ પ્રવેગક સંપર્કોના એક્યુએટિંગ વોલ્ટેજની ચોક્કસ તીવ્રતા પર હાથ ધરવામાં આવે છે, જેમાંથી દરેક ચોક્કસ પાછું ખેંચવા માટે સેટ છે. મૂલ્ય સ્ટાર્ટર દબાવીને બટનો SB2 KM લાઇનના સંપર્કકર્તાને ચાલુ કરે છે. બધા પ્રતિકાર R1, R2, R3 આર્મેચર વિન્ડિંગ સાથે શ્રેણીમાં જોડાયેલા હશે અને વર્તમાનને મર્યાદિત કરશે.
ચોક્કસ ઝડપ n1 પર, સંપર્કકર્તા K1 ની કોઇલનું વોલ્ટેજ Uy1 છે

જ્યાં અહીં આ મશીનનો ગુણાંક છે.
જ્યારે Uy1 પુલ-ડાઉન વોલ્ટેજની બરાબર હશે, ત્યારે સંપર્કકર્તા KM1 ઓપરેટ કરશે અને પ્રતિકાર R1 ને શોર્ટ-સર્કિટ કરશે. n2 અને n3 ના પરિભ્રમણ સુધી પરિભ્રમણની ગતિમાં વધુ વધારો, સંપર્કકર્તા K2 ના કોઇલ પરના વોલ્ટેજમાં વધારો અને મૂલ્યોમાં શોર્ટ સર્કિટ તરફ દોરી જશે.


આ કિસ્સામાં, સંપર્કકર્તા K2 અને શોર્ટ સર્કિટ શ્રેણીમાં કામ કરશે અને R2 અને R3 ને શોર્ટ સર્કિટ કરશે. પ્રતિકાર R3 ને શોર્ટ-સર્કિટ કર્યા પછી, પ્રારંભિક પ્રક્રિયા પૂર્ણ થશે અને મોટર લાંબા સમય સુધી ચાલી શકશે.
ઇન્ડક્શન મોટરના રોટર સર્કિટમાં EMF એ સ્લિપના પ્રમાણસર છે, એટલે કે E2s = E2s. અહીં E2 એ સ્થિર રોટરનું emf છે.
સ્લિપ જેટલી ઓછી, EMF નીચું, એટલે કે, મોટર રોટરની ગતિ વધારે. ઘાયલ રોટર સાથે એસી મોટર્સની શરૂઆતને નિયંત્રિત કરવા માટે, રિલેનો ઉપયોગ કરવામાં આવે છે જે રોટર સર્કિટમાં ઇએમએફના મૂલ્યને નિયંત્રિત કરે છે.લાગતાવળગતા ઉપકરણો (રિલે, કોન્ટેક્ટર્સ) જે શોર્ટ-સર્કિટ શરૂ થતા પ્રતિકારને આ વોલ્ટેજમાં સમાયોજિત કરે છે.
ઘા-રોટર ઇન્ડક્શન મોટર્સ અને સિંક્રનસ મોટર્સના નિયંત્રણ માટે, આવર્તન પદ્ધતિનો ઉપયોગ ગતિના કાર્ય તરીકે પણ થઈ શકે છે. આ પદ્ધતિ સ્ટેટર ક્ષેત્ર n0 અને રોટર n2 ના પરિભ્રમણની આવર્તન પર રોટર વર્તમાન f2 ની આવર્તનની જાણીતી અવલંબન પર આધારિત છે, એટલે કે.
દરેક રોટરની ગતિ ચોક્કસ f2 મૂલ્યને અનુરૂપ હોવાથી, તે આવર્તન પર સેટ કરેલ અને મોટર રોટર સર્કિટ સાથે જોડાયેલ રિલે કોન્ટેક્ટર કોઇલ સર્કિટ પર કાર્ય કરશે. કોન્ટેક્ટર આપેલ ગતિએ પ્રતિકારના તબક્કાઓને શોર્ટ સર્કિટ કરશે.
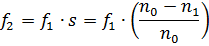
વિરોધી મોટર્સ દ્વારા બ્રેકિંગ ઝડપના આધારે કરવામાં આવે છે ઝડપ નિયંત્રણ રિલે એસ.આર. ફિગ. 2, a, b માં વિરોધ દ્વારા અસુમેળ મોટરોને રોકવાના ઉદાહરણો બતાવો.
ચોખા. 2. વિરોધના માધ્યમથી અસુમેળ મોટરોને રોકવાની યોજનાઓ: a — બિન-ઉલટાવી શકાય તેવું; b - ઉલટાવી શકાય તેવું
આ યોજનાઓ કેવી રીતે કામ કરે છે તેના પર એક નજર કરીએ.
SB2 બટન દબાવવાથી સંપર્કકર્તા KM ની કોઇલ ચાલુ થાય છે (જુઓ. ફિગ. 2, a), જે પાવર સંપર્કોને બંધ કરે છે અને SB2 બટનને અવરોધિત કરે છે. તે જ સમયે, બ્રેક કોન્ટેક્ટર KM1 અને સ્પીડ કંટ્રોલ રિલે SR ના કોઇલના સર્કિટમાં ઓપનિંગ બ્લોક KM નો સંપર્ક તેમને નેટવર્કથી ડિસ્કનેક્ટ કરે છે. જ્યારે મોટર રોટર ચોક્કસ ઝડપે પહોંચે છે, ત્યારે SR સંપર્ક બંધ થઈ જાય છે, પરંતુ આનાથી KM1 સંપર્કકર્તા કામ કરશે નહીં. એન્જિન સામાન્ય રીતે ચાલવાનું ચાલુ રાખે છે.
કાઉન્ટર-સ્વિચિંગ બ્રેક સાથે મોટરને રોકવાનું કામ SB બટન દબાવીને કરવામાં આવે છે.તે જ સમયે, સંપર્કકર્તા KM ની કોઇલ તટસ્થ થઈ જાય છે, અને તેના મુખ્ય સંપર્કો અદૃશ્ય થઈ જાય છે અને મોટરને નેટવર્કથી ડિસ્કનેક્ટ કરે છે. KM1 ના બ્રેક કોન્ટેક્ટર સર્કિટમાં KM ઓપનિંગ કોન્ટેક્ટ બંધ થઈ જશે. આ ક્ષણે સ્પીડ કંટ્રોલ રિલે એસઆરનો સંપર્ક બંધ હોવાથી, બ્રેક કોન્ટેક્ટરના મુખ્ય સંપર્કો તરત જ ચાલુ થઈ જાય છે અને સ્ટેટર વિન્ડિંગને રિવર્સ પર સ્વિચ કરવામાં આવે છે, ચુંબકીય ક્ષેત્ર વિરુદ્ધ દિશામાં ફેરવવાનું શરૂ કરશે, એટલે કે. કાઉન્ટર સ્વિચિંગ દ્વારા રોટર અને મોટરનું પરિભ્રમણ બંધ કરવામાં આવશે. રોટરની ઝડપ ઘટે છે અને ચોક્કસ નાના મૂલ્ય પર તેના RKS સ્પીડ કંટ્રોલ રિલેના સંપર્કો ખુલશે અને મોટરને મેઇન્સથી ડિસ્કનેક્ટ કરશે.
વિપરીત બ્રેકિંગ (ફિગ. 2, b) સાથે રિવર્સ કંટ્રોલના કિસ્સામાં, SB1 બટન દબાવીને મોટર આગળ શરૂ થાય છે, જે, સંપર્કકર્તા KM1 ના કોઇલના સર્કિટને બંધ કરીને, ખાતરી કરે છે કે મોટર સાથે જોડાયેલ છે. નેટવર્ક મોટર રોટર ફરવાનું શરૂ કરશે અને જ્યારે તે ચોક્કસ ઝડપે પહોંચશે, ત્યારે સ્પીડ કંટ્રોલ રિલેનો બંધ સંપર્ક SR1 બંધ થશે અને પ્રારંભિક સંપર્ક SR2 ખુલશે.
કોન્ટેક્ટર KM2 ની કોઇલ પર સ્વિચ કરવું એ થશે નહીં કારણ કે કોન્ટેક્ટર KM1 ના ઓપનિંગ કોન્ટેક્ટમાં તેની સર્કિટ તૂટી ગઈ છે. આ સ્થિતિમાં, SB બટન દબાવવામાં ન આવે ત્યાં સુધી મોટર ચાલવાનું ચાલુ રાખશે. જ્યારે SB બટન દબાવવામાં આવે છે, ત્યારે કોઇલ KM1 નું સર્કિટ બંધ થાય છે. આ વિરામ સંપર્ક KM1 બંધ કરશે અને સંપર્કકર્તા KM2 ના કોઇલ સર્કિટને પાવર પ્રાપ્ત થશે.
મોટર સ્ટેટર વિન્ડિંગ રિવર્સ સાથે જોડાશે. જેમ જેમ રોટર જડતા દ્વારા સમાન દિશામાં ફેરવવાનું ચાલુ રાખે છે, વિરોધ બ્રેકિંગ થાય છે.જ્યારે ઝડપ ચોક્કસ નાના મૂલ્ય સુધી ઘટે છે, ત્યારે સ્પીડ કંટ્રોલ રિલે તેનો સંપર્ક SR1 ખોલે છે, સંપર્કકર્તા KM2 નેટવર્કમાંથી મોટરને બંધ કરશે અને ડિસ્કનેક્ટ કરશે.
એન્જિનને રિવર્સમાં શરૂ કરવા માટે, SB2 બટન દબાવો. આખી પ્રક્રિયા વર્ણવેલ પ્રક્રિયા જેવી જ હશે. હવે બ્રેક કોન્ટેક્ટરની ભૂમિકા KM1 કોન્ટેક્ટર દ્વારા ભજવવામાં આવે છે, અને સ્પીડ કંટ્રોલ રિલેના SR2 સંપર્કો બ્રેકિંગ પ્રક્રિયાને નિયંત્રિત કરશે.
સિંક્રનસ મોટરનું સ્વચાલિત પ્રારંભ એ જાણીતી મુશ્કેલીઓ સાથે સંકળાયેલું છે, કારણ કે આ કિસ્સામાં ફક્ત પ્રારંભિક વર્તમાનને મર્યાદિત કરવા માટે જ નહીં, પણ નેટવર્ક સાથે મશીનને સિંક્રનાઇઝ કરવું પણ જરૂરી છે.
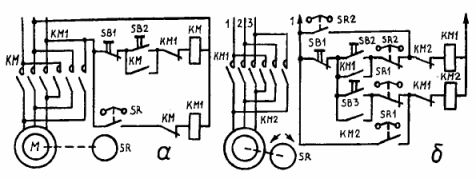
ઓછી શક્તિની સિંક્રનસ મોટર માટેનું નિયંત્રણ સર્કિટ ફિગમાં બતાવવામાં આવ્યું છે. 3. સ્ટેટર વિન્ડિંગમાં સમાવિષ્ટ સક્રિય પ્રતિકાર દ્વારા ઇનરશ વર્તમાન મર્યાદા પૂરી પાડવામાં આવે છે. એન્જીન શરૂ કરતા પહેલા, એસી અને ડીસી મેઈનના સ્વચાલિત ઇનપુટ સ્વિચ QF અને QF1 ચાલુ કરો, જે મહત્તમ અને થર્મલ સુરક્ષા પ્રદાન કરે છે. સ્ટાર્ટ બટન SB2 દબાવવાથી, સંપર્કકર્તા KM ની કોઇલ ચાલુ થાય છે, અને KM ના મુખ્ય સંપર્કો દ્વારા સિંક્રનસ મોટરનું સ્ટેટર વિન્ડિંગ પ્રારંભિક રેઝિસ્ટર Rn દ્વારા નેટવર્ક સાથે જોડાયેલ છે. કોઇલ સ્વ-લોકીંગ છે અને ડીસી સર્કિટમાં તેના સંપર્કમાં લોકીંગ રિલે KVનો સમાવેશ થાય છે, જે બંધ થવાથી સંપર્કકર્તા K1 અને K2 ના કોઇલને સ્વિચ કરવા માટે તૈયાર કરે છે.
LM રોટરના ઉત્તેજના સર્કિટમાં KF1 અને KF2 ફ્રિકવન્સી રિલે એન્જિનની ગતિના આધારે કાર્ય કરે છે. સ્ટાર્ટ-અપ સમયે, જ્યારે રોટર સ્લિપ સૌથી વધુ હોય છે, ત્યારે KF1 અને KF2 રિલેના તૂટેલા સંપર્કો ખુલે છે.KV બ્લોકિંગ રિલે ચાલુ થાય તે પહેલાં કોઇલનું ઉદઘાટન થાય છે અને K1 કોઇલ પાવર પ્રાપ્ત કરશે નહીં. જ્યારે રિલે રેગ્યુલેશન અનુસાર એન્જિન RPM લગભગ 60-95% સિંક્રનસ સુધી પહોંચે ત્યારે KF1 અને KF2 રિલે સંપર્કો ફરીથી બંધ થઈ જશે.
રિલે KF1 ના સંપર્કોને બંધ કર્યા પછી, સંપર્કકર્તા K1 ની કોઇલ ચાલુ થશે, મુખ્ય સર્કિટમાં તેના સંપર્કો આરપી રેઝિસ્ટરને શોર્ટ-સર્કિટ કરશે અને સ્ટેટર સંપૂર્ણ લાઇન વોલ્ટેજ પર ચાલુ થશે. જ્યારે રિલે KF2 ના ખુલ્લા સંપર્કો બંધ થાય છે, ત્યારે સંપર્કકર્તા K2 ની કોઇલને સપ્લાય કરવા માટે એક સર્કિટ બનાવવામાં આવે છે, સંપર્કકર્તા K1 થી સ્વતંત્ર રીતે, તેનો સંપર્ક સિંક્રનસ ગતિના આશરે 60% ની ઝડપે ખુલે છે.
કોન્ટેક્ટર K2 પાસે બે વિન્ડિંગ્સ છે: એક મુખ્ય, KM1 ખેંચીને અને બીજી વિન્ડિંગ KM2, લૉકને છોડવા માટે રચાયેલ છે, જે સંપર્કકર્તા સાથે પ્રદાન કરવામાં આવે છે. ટેક-અપ કોઇલ KM1 પર સ્વિચ કર્યા પછી, ઉત્તેજના સર્કિટમાં બંધ થતા સંપર્કો K2 બંધ થાય છે, અને પ્રારંભિક સંપર્કો K2 ખુલે છે, ડિસ્ચાર્જ રેઝિસ્ટર R1 અને R2 થી રોટર વિન્ડિંગને ડિસ્કનેક્ટ કરે છે અને રોટરને ડીસી નેટવર્કથી કનેક્ટ કરે છે.
ચોખા. 3. સિંક્રનસ મોટર નિયંત્રણ યોજના
સંપર્કકર્તા K2 ના સંપર્કો નીચેના ક્રમમાં કાર્ય કરે છે. પીકઅપ કોઇલના સપ્લાય સર્કિટમાં N/O કોન્ટેક્ટ K2 ખુલે છે, પરંતુ બ્લોકીંગ એક્શન કોન્ટેક્ટરને એનર્જીકૃત રાખે છે. બંધ થતા સંપર્કો K2 બે કોઇલના સપ્લાય સર્કિટમાં અને કોઇલ KM2 ના સર્કિટમાં બંધ થાય છે, પછીના સ્વિચિંગ માટે સર્કિટ તૈયાર કરે છે. કોઇલ KM2 માંથી લોકીંગ મિકેનિઝમ બહાર પડતાની સાથે જ કોઇલ K2 ડી-એનર્જાઈઝ થઈ જશે. SB1 બટન દબાવવાથી મોટર મેઇન્સથી ડિસ્કનેક્ટ થઈ જાય છે.કોઇલ K1 એ કોઇલ KM2 ના સર્કિટમાં તેનો પ્રારંભિક સંપર્ક પ્રકાશિત કરે છે, જે લૅચને મુક્ત કરે છે અને કોઇલ KM1 બંધ કરે છે, જેના પછી સર્કિટ તેની મૂળ સ્થિતિમાં પાછી આવે છે.