ઇલેક્ટ્રિક મોટર્સના નિયમનકારી ગુણધર્મો
 ભૌતિક પ્રક્રિયા (કોઈપણ પરિમાણ) ના કોઈપણ મૂલ્યને નિયંત્રિત કરવાનો અર્થ એ છે કે આપેલ સ્તર પર આપેલ મૂલ્ય જાળવી રાખવું અથવા આપેલ કાયદા અનુસાર તેને બદલવું.
ભૌતિક પ્રક્રિયા (કોઈપણ પરિમાણ) ના કોઈપણ મૂલ્યને નિયંત્રિત કરવાનો અર્થ એ છે કે આપેલ સ્તર પર આપેલ મૂલ્ય જાળવી રાખવું અથવા આપેલ કાયદા અનુસાર તેને બદલવું.
વ્યક્તિગત એક્ટ્યુએટર અથવા ઉત્પાદન પદ્ધતિને સામાન્ય કામગીરી માટે એક્ટ્યુએટર મોટર્સની વિવિધ રોટેશનલ ગતિની જરૂર પડે છે.
ઉદાહરણ તરીકે, પેપર મશીનના દરેક વિભાગને લોડના ફેરફારોને ધ્યાનમાં લીધા વિના સખત સ્થિર ગતિએ ફરવું જોઈએ, અને ડ્રાઈવ આ ઝડપ જાળવી રાખવામાં અને દરેક વિભાગની ગતિને વ્યક્તિગત રીતે અને સમગ્ર પેપર મશીનની સંપૂર્ણ રીતે બદલવા માટે સક્ષમ હોવી જોઈએ.
ઇલેક્ટ્રિક મોટર્સની ગતિને અલગ અલગ રીતે નિયંત્રિત કરવામાં આવે છે. પ્રોપલ્શન માટે ડ્રાઇવ મોટરની યોગ્ય પસંદગી માટે આ જાણવું જરૂરી છે. ગતિની તીવ્રતા પર શાફ્ટ પરની શક્તિ અને ક્ષણના મૂલ્યોની અવલંબનમાં ડ્રાઇવ્સ અલગ પડે છે.
અમુક મિકેનિઝમ્સ ગતિમાં ફેરફાર સાથે સતત ટોર્ક મૂલ્ય જાળવી રાખે છે. આમાં શામેલ છે, ઉદાહરણ તરીકે, મેટલ કટીંગ મશીનો… આ કિસ્સામાં, શક્તિ પરિભ્રમણની ગતિના પ્રમાણમાં બદલાય છે (ગ્રાફિકલી, તે ફિગ. 1 માં સીધી રેખા દ્વારા દર્શાવવામાં આવ્યું છે).
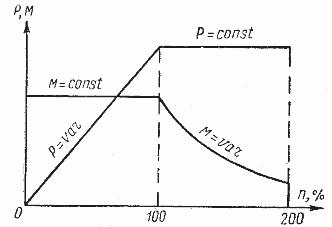
ચોખા. 1. સતત શક્તિ અને સતત ટોર્ક પર ઝડપ નિયંત્રણ વણાંકો
જ્યારે ઝડપ બદલાય ત્યારે અન્ય મિકેનિઝમ્સને સતત પાવર Pની જરૂર પડે છે (દા.ત લિફ્ટિંગ અને ટ્રાન્સપોર્ટ મિકેનિઝમ્સ). આ કિસ્સામાં, હાયપરબોલા કાયદા અનુસાર ક્ષણની તીવ્રતા બદલાય છે.
તમે ફોર્મ્યુલા P = Мω10-3kWh નો ઉપયોગ કરીને ગ્રાફ બનાવી શકો છો,
જ્યાં: M એ શાફ્ટની ક્ષણ છે, N x m, ω = (2πn) / 60 — કોણીય વેગ.
અંજીરમાં. 1 સંયુક્ત વળાંકો બતાવે છે જ્યાં ગતિ શૂન્યથી રેટેડમાં બદલાય છે, ટોર્ક સ્થિર રહે છે. આ કિસ્સામાં, શક્તિ મૂળમાંથી પસાર થતી સીધી રેખા સાથે વધે છે. પછી, ગતિમાં વધુ વધારો સાથે, શક્તિ સતત રહે છે અને અતિપરવલાના નિયમ અનુસાર ક્ષણ ઘટે છે.
આ પણ વાંચો: ઇલેક્ટ્રિક મોટર્સ અને ઉત્પાદન મિકેનિઝમ્સની યાંત્રિક લાક્ષણિકતાઓ