બંધ સ્વચાલિત નિયંત્રણ સિસ્ટમો
 ક્લોઝ્ડ ઓટોમેટિક કંટ્રોલ સિસ્ટમ્સ (ACS) ઉપયોગમાં લેવાતા સાધનોમાં અને ઓટોમેશનની સંપૂર્ણતામાં ઓપન સર્કિટથી અલગ છે. ACS ખોલવા સાથે, મુખ્ય એકમ (નિયંત્રણ સાધનો સહિત) ઇલેક્ટ્રિકલ ઇન્સ્ટોલેશન (ડ્રાઇવિંગ મોટર, રનિંગ મશીન) ના વાસ્તવિક ઓપરેટિંગ મોડ વિશે માહિતી પ્રાપ્ત કરતું નથી.
ક્લોઝ્ડ ઓટોમેટિક કંટ્રોલ સિસ્ટમ્સ (ACS) ઉપયોગમાં લેવાતા સાધનોમાં અને ઓટોમેશનની સંપૂર્ણતામાં ઓપન સર્કિટથી અલગ છે. ACS ખોલવા સાથે, મુખ્ય એકમ (નિયંત્રણ સાધનો સહિત) ઇલેક્ટ્રિકલ ઇન્સ્ટોલેશન (ડ્રાઇવિંગ મોટર, રનિંગ મશીન) ના વાસ્તવિક ઓપરેટિંગ મોડ વિશે માહિતી પ્રાપ્ત કરતું નથી.
બંધ ASUB માં, માહિતી નિયંત્રણ તત્વોમાં પ્રસારિત થાય છે, જે યોગ્ય આદેશ સંકેતોની રજૂઆત સાથે છે. સર્કિટ જે આવી માહિતી પ્રસારિત કરે છે તે નિયંત્રણ લૂપને બંધ કરે છે, બંધ ACS અથવા પ્રતિસાદ ACS બનાવે છે.
બંધ અને ખુલ્લા ACS વચ્ચેનો તફાવત જનરેટર-મોટર (G-D) સિસ્ટમમાં ઇલેક્ટ્રિક મોટરની ઝડપને નિયંત્રિત કરવાના ઉદાહરણ દ્વારા સમજાવી શકાય છે. ACS ઓપન (ફિગ. 1, a) સાથે, ઇલેક્ટ્રિક મોટરની સેટ સ્પીડ પોટેન્ટિઓમીટર પી દ્વારા મેન્યુઅલી સેટ કરવામાં આવે છે. સ્પીડ એડજસ્ટમેન્ટ ટેકોમીટર દ્વારા દૃષ્ટિની રીતે હાથ ધરવામાં આવે છે, જે TG ટેકોજનરેટર દ્વારા સંચાલિત છે. ઓપરેટર દ્વારા પોટેંશિયોમીટર સ્લાઇડર પર કાર્ય કરીને સેટપોઇન્ટમાંથી કોઇપણ ઝડપનું વિચલન દૂર કરવામાં આવે છે.
બંધ ACS માં (ફિગ.1, b) TG ટેકોજનરેટરનું આર્મેચર OVG જનરેટરના ઉત્તેજના સર્કિટમાં શામેલ છે, બંધ અથવા પ્રતિસાદ સિસ્ટમ બનાવે છે (આ કિસ્સામાં ઝડપ પ્રતિસાદ સાથે).
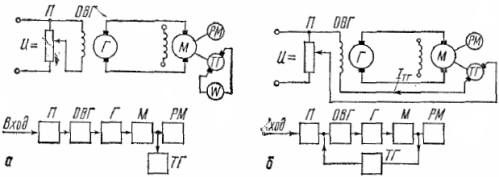
ચોખા. 1. G -M સિસ્ટમમાં ઇલેક્ટ્રિક મોટર કંટ્રોલ સર્કિટ: a — ઓપન ACS, b — બંધ ACS
ટેકોજનરેટર (Aztg) દ્વારા પોટેન્ટિઓમીટર (Azn) ના વર્તમાન તરફ નિર્દેશિત બંધ સર્કિટમાં ઉત્પન્ન થયેલ વર્તમાન અને આ પ્રવાહોના ભૌમિતિક તફાવતની સમાન સર્કિટમાં પરિણામી વર્તમાન કાર્ય કરે છે. પોટેન્ટિઓમીટરના સ્લાઇડરનો ઉપયોગ કરીને, ઓપરેટર OVG ના ઉત્તેજના કોઇલમાં પરિણામી વર્તમાનનું મૂલ્ય સેટ કરે છે, જેના પર ઇલેક્ટ્રિક મોટરની અનુરૂપ ગતિ પ્રદાન કરવામાં આવે છે. આ તે છે જ્યાં ઓપરેટરની ભૂમિકા સમાપ્ત થાય છે. ભવિષ્યમાં, સિસ્ટમ ચોક્કસ ચોકસાઈ સાથે ઇલેક્ટ્રિક ડ્રાઇવના ઑપરેશનના સેટ મોડને આપમેળે જાળવે છે.
ધારો કે લોડ સ્પાઇકના પરિણામે, નિર્દિષ્ટ એકની તુલનામાં ઇલેક્ટ્રિક મોટરની ગતિમાં ઘટાડો થયો છે. ઝડપમાં ઘટાડો ટેકોજનરેટરની ઝડપ અને તેના ટર્મિનલ્સ પરના વોલ્ટેજમાં અનુરૂપ ઘટાડો સાથે છે. આ, બદલામાં, પ્રતિસાદ સર્કિટમાં વર્તમાન એઝટીજીમાં ઘટાડો તરફ દોરી જશે, અને પોટેન્ટિઓમીટરના સ્લાઇડરની ચોક્કસ સ્થિતિમાં - જનરેટરના ઉત્તેજના વિન્ડિંગમાં પરિણામી પ્રવાહમાં વધારો. જનરેટર વોલ્ટેજ અને મોટરની ગતિ તે મુજબ વધશે.
ઝડપ અને વોલ્ટેજ વધારવાની પ્રક્રિયા ત્યાં સુધી ચાલુ રહેશે જ્યાં સુધી ફીડબેક લૂપમાંનો વર્તમાન સેટ મૂલ્ય સુધી પહોંચે અને મોટરની ઝડપ સેટ મૂલ્ય સુધી ન પહોંચે.
સ્વચાલિત નિયંત્રણ સિસ્ટમોના વિશ્લેષણમાં, કાર્ય ચાર્ટ… ફિગ માં.ACS ની 2 ટ્રાન્સમિશન કાર્યાત્મક યોજના, જેમાં નીચેના ઘટકોનો સમાવેશ થાય છે:
1 — મુખ્ય ઉપકરણ જે ઑપરેશનનો મોડ સેટ કરે છે, આદેશ આપે છે, પલ્સ અથવા સિગ્નલ શરૂ કરે છે,
2 - સરખામણીનું તત્વ. તેમાં માસ્ટર તરફથી સિગ્નલ X1 નો સમાવેશ થાય છે, સિગ્નલ X0, જે નિયંત્રિત મૂલ્યની ઝડપ અથવા સ્તર નક્કી કરે છે. નવમા મુખ્ય પ્રતિસાદ તત્વના સિગ્નલને ધ્યાનમાં લેતા, તત્વ 2 પ્રાપ્ત સિગ્નલોની તુલના કરે છે અને વધારામાં સુધારેલ સિગ્નલ X2 મોકલે છે,
3 - ટ્રાન્સફોર્મિંગ એલિમેન્ટ, સિગ્નલ ઓપ તેને બીજા સ્વરૂપમાં રૂપાંતરિત કરે છે, વધુ ટ્રાન્સમિશન માટે વધુ અનુકૂળ. ઉદાહરણ તરીકે, સિગ્નલ X2 હાઇડ્રોલિક (વાયુયુક્ત, યાંત્રિક) દબાણના સ્વરૂપમાં પૂરું પાડવામાં આવે છે. એલિમેન્ટ 3 તેને ઇલેક્ટ્રિક પ્રવાહમાં રૂપાંતરિત કરે છે. કારણ કે આ પ્રકારના પરિવર્તન માટે વધારાની ઊર્જાની જરૂર પડી શકે છે, પછી તત્વ 3 PE ઉર્જા સ્ત્રોત સાથે જોડાયેલ છે,
4 — તત્વ ઉમેરવાથી, તે બે સંકેતો મેળવે છે: સુધારણા તત્વ (મેમરી તત્વ) માંથી X3 અને X8 8. આ સંકેતોનો સરવાળો તત્વ 4 દ્વારા કરવામાં આવે છે અને આગામી તત્વ પર મોકલવામાં આવે છે,
5 — એમ્પ્લીફાઈંગ એલિમેન્ટ, ઇનપુટ સિગ્નલ X1 નબળો હોઈ શકે છે અને અનુગામી ટ્રાન્સમિશન માટે એમ્પ્લીફાઈડ હોવું આવશ્યક છે. આ એલિમેન્ટ 5 દ્વારા કરવામાં આવે છે જે PE પાવર સ્ત્રોત સાથે જોડાયેલ છે,
6 — એક્ઝિક્યુટિવ એલિમેન્ટ, પ્રાપ્ત સિગ્નલનો અમલ કરે છે (ઇલેક્ટ્રિક મોટર, ઇલેક્ટ્રોમેગ્નેટિક રિલે, સર્વો મોટર),
7 - એડજસ્ટેબલ ઑબ્જેક્ટ અથવા વર્કિંગ મશીન.
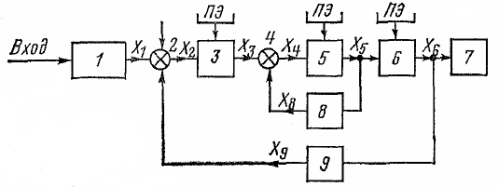
ચોખા. 2. ACS નું કાર્યાત્મક રેખાકૃતિ
દરેક ઓટોમેશન એલિમેન્ટ એ એનર્જી કન્વર્ટર છે, જેના ઇનપુટ પર મૂલ્ય X' લાગુ કરવામાં આવે છે, અને મૂલ્ય X આઉટપુટમાંથી દૂર કરવામાં આવે છે. "સ્થિર સ્થિતિમાં દરેક તત્વ માટે ચોક્કસ અવલંબન X" (X') હોય છે, જેને સ્થિર લાક્ષણિકતા કહેવાય છે.
બંધ સ્વચાલિત નિયંત્રણ સિસ્ટમ પ્રતિસાદની હાજરી દ્વારા વર્ગીકૃત થયેલ છે; તે સિસ્ટમના આઉટપુટને તેના ઇનપુટ સાથે જોડતો ઓછામાં ઓછો એક પ્રતિસાદ લૂપ ધરાવે છે. વધુમાં, વ્યક્તિગત ACS તત્વોના આઉટપુટ અને ઇનપુટને કનેક્ટ કરીને, કહેવાતા આંતરિક પ્રતિસાદ હોઈ શકે છે.
પ્રતિસાદ સખત અને લવચીકમાં વહેંચાયેલો છે. સખત મર્યાદાઓ સિસ્ટમના સંચાલનના ક્ષણિક અને સ્થિર બંને સ્થિતિમાં કાર્ય કરે છે, લવચીક - ફક્ત ક્ષણિકમાં. હકારાત્મક અને નકારાત્મક પ્રતિસાદ વચ્ચે તફાવત કરો. જેમ જેમ નિયંત્રિત મૂલ્ય વધે છે તેમ, સકારાત્મક જોડાણ તેને વધુ વધારે છે, અને નકારાત્મક, તેનાથી વિપરીત, ઘટે છે. પ્રતિસાદ પરિભ્રમણના કોણ, ઝડપ, વોલ્ટેજ, વર્તમાન, વગેરેના પ્રમાણસર સંકેતો પ્રસારિત કરી શકે છે. અને તે મુજબ કોણ, ઝડપ, વોલ્ટેજ, વર્તમાન પ્રતિસાદ કહેવાય છે. વધુ વિગતો માટે અહીં જુઓ: ઓટોમેશન સિસ્ટમ્સના તત્વો
ઓપરેશનના સિદ્ધાંત મુજબ, ACS ને ત્રણ જૂથોમાં વિભાજિત કરી શકાય છે:
-
સતત કામગીરી જેમાં નિયંત્રિત અને સેટ મૂલ્યો વચ્ચેનો સંબંધ તૂટી ગયો નથી,
-
આવેગ ક્રિયા, જેમાં નિયંત્રિત અને સેટ મૂલ્યો વચ્ચેનું જોડાણ નિયમિત અંતરાલે થાય છે,
-
રિલે ક્રિયા જ્યાં સંચાર ત્યારે જ થાય છે જ્યારે મૂલ્ય ચોક્કસ મૂલ્ય સુધી પહોંચે છે.
કાયદાના આધારે જે મુજબ આપેલ મૂલ્ય સમય સાથે બદલાય છે, ACS ને ત્રણ જૂથોમાં પણ વિભાજિત કરી શકાય છે:
-
સ્થિર અથવા નીચી સેટપોઇન્ટ સિસ્ટમો જેમાં આપમેળે નિયંત્રિત મૂલ્ય સ્થિર રાખવામાં આવે છે. આ સ્ટેબિલાઈઝેશન સિસ્ટમ્સ છે, જે અનિવાર્યપણે ઓટોમેટિક કંટ્રોલ સિસ્ટમ્સ (ACS),
-
સિસ્ટમો જેમાં લક્ષ્ય મૂલ્ય ચોક્કસ, પૂર્વનિર્ધારિત પ્રોગ્રામ અનુસાર બદલાય છે. તે એક સોફ્ટવેર મેનેજમેન્ટ સિસ્ટમ છે,
-
સિસ્ટમો જેમાં આપેલ મૂલ્ય વ્યાપકપણે બદલાઈ શકે છે અને મનસ્વી કાયદા અનુસાર, એટલે કે. ટ્રેકિંગ સિસ્ટમ્સ.