વર્તમાનના કાર્ય તરીકે મોટર નિયંત્રણ
 સ્ટેટર વર્તમાનની મજબૂતાઈના આધારે મોટર નિયંત્રણ કરી શકાય છે. ઘા-રોટર ઇન્ડક્શન મોટરના વર્તમાનના કાર્ય તરીકે પ્રારંભિક સર્કિટ ફિગમાં બતાવવામાં આવ્યું છે. 1 એ.
સ્ટેટર વર્તમાનની મજબૂતાઈના આધારે મોટર નિયંત્રણ કરી શકાય છે. ઘા-રોટર ઇન્ડક્શન મોટરના વર્તમાનના કાર્ય તરીકે પ્રારંભિક સર્કિટ ફિગમાં બતાવવામાં આવ્યું છે. 1 એ.
શરૂ થવાની ક્ષણે, વર્તમાન મૂલ્ય I1 સુધી પહોંચે છે, અને ચોક્કસ સમય અંતરાલ પછી તે મૂલ્ય I2 (અંજીર b) સુધી ઘટે છે. આ બિંદુએ, રોટર સર્કિટમાં પ્રારંભિક પ્રતિકારનો ભાગ આપમેળે શોર્ટ-સર્કિટ થાય છે, વર્તમાન મૂલ્ય I1 સુધી વધે છે, પછી મૂલ્ય I2 પર ફરીથી ડ્રોપ થાય છે, જે પ્રારંભિક પ્રતિકારનો બીજો ભાગ ટૂંકા થવાનું કારણ બને છે. આ પ્રક્રિયાને પુનરાવર્તિત કરવામાં આવે છે જ્યાં સુધી પ્રારંભિક પ્રતિકારના તમામ તબક્કા ટૂંકા-સર્કિટ ન થાય. આ હેતુઓ માટે, ઓવરકરન્ટ રિલેનો ઉપયોગ કરવામાં આવે છે, જેની વિન્ડિંગ્સ મોટરના પાવર સર્કિટમાં શામેલ છે.
જ્યારે તમે પર ક્લિક કરો પ્રારંભ બટન SB1 (અંજીર જુઓ. A) સંપર્કકર્તા KM સક્રિય થયેલ છે, જેમાંથી મુખ્ય સંપર્કો રોટર સર્કિટમાં સામાન્ય પ્રારંભિક પ્રતિકાર પર મોટરને નેટવર્ક સાથે જોડે છે. આ કિસ્સામાં, કેએ રિલેની કોઇલ પાવર મેળવે છે, જેનાં પ્રારંભિક સંપર્કો પ્રવેગક કોઇલ K1 ના સર્કિટમાં છે.KA રિલે સેટ કરેલ છે જેથી પ્રતિભાવ સમય K1 સંપર્કકર્તા કરતા ઓછો હોય. વધુમાં, મહત્તમ અનુમતિપાત્ર મૂલ્ય પર તેના બ્રેકિંગ સંપર્કો વર્તમાન વર્તમાન ખુલ્લું છે, અને જ્યારે વર્તમાન તેના સ્વિચિંગ મૂલ્યમાં ઘટે છે, ત્યારે તે ફરીથી બંધ થાય છે, જેના કારણે કોઇલ K1 રિલે KA ના સંપર્કો દ્વારા પ્રારંભિક પ્રતિકારના તબક્કાના શોર્ટ સર્કિટની ક્ષણે ચાલુ થાય છે.
રિલે KA પ્રવેગક સંપર્કકર્તા K1 ને એનર્જી કરવામાં આવે તે પહેલાં કાર્ય કરશે, અને જ્યારે પ્રારંભિક પ્રતિકાર સંપૂર્ણ રીતે દાખલ થાય ત્યારે મોટર વેગ આપશે. શરૂઆતી સ્વિચિંગ કરંટ ઘટે તેમ, KA રિલેના સંપર્કો બંધ થશે અને કોઇલ K1 ચાલુ થશે. તે જ સમયે, સંપર્ક K1 બંધ થાય છે, જે રિલે KA થી સ્વતંત્ર રીતે કોઇલને સ્વ-શક્તિ પ્રદાન કરે છે, અને નિયંત્રણ સર્કિટમાં સંપર્ક ખુલે છે, પ્રવેગક K2 ના અકાળ સમાવેશને અટકાવે છે.
સપ્લાય સંપર્કો K1 એ પ્રારંભિક પ્રતિકારના શોર્ટ સર્કિટનો ભાગ હોવાથી, સ્ટેટર વર્તમાન મહત્તમ મૂલ્ય સુધી વધે છે અને રિલે KA, જ્યારે ટ્રિગર થાય છે, ત્યારે કોઇલ K2 ના સપ્લાય સર્કિટમાં તેના સંપર્કો ખોલે છે. જ્યારે મોટર પર્યાપ્ત ગતિએ પહોંચે છે અને સ્ટેટર વર્તમાન સ્વિચિંગ કરંટ પર પાછો આવે છે, ત્યારે રિલે KA ના સંપર્કો બંધ થશે અને કોઇલ K2 ચાલુ કરશે, જે તેના સંપર્કો સામે પ્રતિકાર શરૂ કરવાના બીજા તબક્કાને શોર્ટ-સર્કિટ કરે છે.
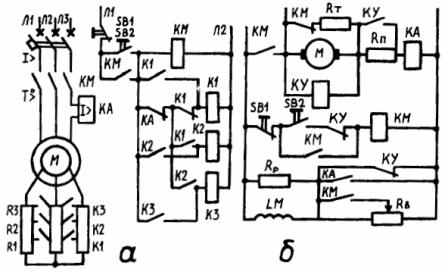
ચોખા. 1. વર્તમાન પર આધાર રાખીને નિયંત્રણ સર્કિટ: a — ફેઝ રોટર સાથે અસુમેળ મોટર; b — સમાંતર ઉત્તેજના સાથે ડીસી મોટર
આ કિસ્સામાં, સ્ટેટર વર્તમાન ફરી વધે છે, કેએ રિલે તેના સંપર્કો ચલાવશે અને ખોલશે. કોઇલ K2 પાવર ગુમાવશે નહીં કારણ કે તેની પાસે સહાયક સંપર્કો K2 સાથે બંધ થવાનો સમય હશે.આગામી પ્રવેગક પછી સ્ટેટર પ્રવાહમાં વધુ ઘટાડો થવાથી વિન્ડિંગ K3 ચાલુ થશે અને પ્રારંભિક પ્રતિકારના છેલ્લા તબક્કામાં શોર્ટ-સર્કિટ થશે. SB બટન દબાવવાથી મોટર બંધ થઈ જાય છે અને સર્કિટ આગલી શરૂઆત માટે તૈયાર થઈ જાય છે. 12 ના વર્તમાન પર પાછા ફરવા માટે ગોઠવેલ વર્તમાન રિલેનો ઉપયોગ કરીને, વિવિધ ઇલેક્ટ્રિક ડ્રાઇવ્સને રોકી શકાય છે અને ઉલટાવી શકાય છે. વર્તમાન કાર્યમાં કંટ્રોલ સર્કિટનો ગેરલાભ એ તેના બદલે મોટી સંખ્યામાં સંપર્કો છે.
કેટલાક કિલોવોટની સમાંતર-ઉત્તેજિત ડીસી મોટરના અફર નિયંત્રણ માટે, પ્રારંભિક રિઓસ્ટેટના એક તબક્કાનો ઉપયોગ કરી શકાય છે (ફિગ. સી જુઓ). આકૃતિ બતાવે છે: ઉત્તેજના સર્કિટમાં પ્રતિકાર આરબીનું નિયમન; સ્રાવ પ્રતિકાર Rp ઉત્તેજના કોઇલ LM સાથે સમાંતર જોડાયેલ; બ્રેકિંગ રેઝિસ્ટન્સ આરટી જ્યારે નેટવર્કથી ડિસ્કનેક્ટ થાય ત્યારે આર્મેચર M સાથે સમાંતર જોડાયેલ હોય છે અને શરૂઆતના સમયગાળા દરમિયાન આર્મેચર સર્કિટ સાથે શ્રેણીમાં જોડાયેલ પ્રારંભિક પ્રતિકાર આરપી. સ્ટાર્ટ-અપ પર મહત્તમ પ્રવાહ ઉત્પન્ન કરવા માટે, પ્રારંભિક સ્થિતિમાં LM ફીલ્ડ કોઇલ સંપૂર્ણ વોલ્ટેજ પર ચાલુ થાય છે.
જ્યારે SB2 બટન દબાવવામાં આવે છે, ત્યારે લાઇન કોન્ટેક્ટર KM માંથી મોટરનું આર્મેચર રેઝિસ્ટન્સ RP સાથે નેટવર્ક સાથે શ્રેણીમાં જોડાયેલ હોય છે. સ્ટાર્ટર કંટ્રોલ રિલે SC આર્મેચર કરંટના કાર્ય તરીકે કાર્ય કરે છે. જેમ જેમ વર્તમાન વધે છે તેમ, KA નો બંધ સંપર્ક પ્રતિકાર RB ને ચાલાકી કરે છે, ઉત્તેજના ચુંબકીય પ્રવાહમાં વધારો કરે છે, અને જેમ જેમ વર્તમાન ઘટે છે તેમ તેમ, KA નો સંપર્ક ખુલે છે અને LM કોઇલ રિઓસ્ટેટ RB ના પ્રતિકાર સાથે શ્રેણીમાં જોડાયેલ છે, જેના કારણે જે ચુંબકીય પ્રવાહ ઘટે છે.
જ્યારે મોટર શરૂ કરવામાં આવે છે, ત્યારે વધતો પ્રારંભિક આર્મેચર કરંટ KA રિલેને ચાલુ કરે છે અને LM કોઇલ મહત્તમ પ્રવાહ બનાવે છે. જ્યારે ચોક્કસ ઝડપ પહોંચી જાય છે, ત્યારે પ્રવેગક સંપર્કકર્તા K ચાલુ થાય છે, પ્રારંભિક પ્રતિકાર આરપી શોર્ટ-સર્કિટ થાય છે, ત્યારબાદ મોટર તેની કુદરતી લાક્ષણિકતાઓ અનુસાર કાર્ય કરે છે. જ્યારે KA રિલે ઊર્જાવાન થાય તે પહેલાં આર્મેચર કરંટ ઘટે છે (મોટર પ્રવેગકના પરિણામે), ઉત્તેજના સર્કિટમાં KA સંપર્ક ખુલશે.
LM વિન્ડિંગ RB પ્રતિકાર સાથે શ્રેણીમાં ચાલુ થશે, જેના કારણે ફીલ્ડ ફ્લક્સ નબળો પડશે અને આર્મેચર કરંટ તે મુજબ વધશે. KA રિલે ફરીથી કાર્ય કરશે, પ્રવાહને વધારશે અને સાથે જ મોટરની ગતિ વધારશે. સ્ટાર્ટઅપ દરમિયાન, સ્પેસક્રાફ્ટ રિલે ઘણી વખત ટ્રિગર થાય છે જ્યાં સુધી મોટર આરબી કંટ્રોલ રિઓસ્ટેટ દ્વારા નિર્ધારિત ગતિ સુધી પહોંચે નહીં. વર્તમાન કાર્ય તરીકે કાર્યરત આવા વાઇબ્રેટિંગ ઉપકરણ સમયના કાર્ય તરીકે નિયંત્રણ સર્કિટની તુલનામાં સર્કિટને સરળ બનાવે છે.
જ્યારે SB1 બટન દબાવીને મોટર ચાલુ કરવામાં આવે છે, ત્યારે આર્મચર શરૂઆતના સંપર્ક KM થી બ્રેકિંગ રેઝિસ્ટર RT સુધી ચાલુ થાય છે અને ડાયનેમિક બ્રેકિંગ આપમેળે થાય છે. સ્ટોપની શરૂઆતમાં, રેગ્યુલેટિંગ રિઓસ્ટેટના સ્લાઇડર પર KM સંપર્ક ખોલવાને કારણે ચુંબકીય ક્ષેત્ર થોડું નબળું પડી ગયું છે, અને ઉત્તેજના પ્રવાહ સમગ્ર પ્રતિકાર આરબીમાંથી પસાર થાય છે. જેમ જેમ મોટરની ઝડપ વધુ ઘટે છે તેમ, પ્રવેગક સંપર્કકર્તા K ડી-એનર્જાઈઝ થાય છે અને ઉત્તેજના કોઇલને શરૂઆતના સંપર્ક K દ્વારા સંપૂર્ણ લાઇન વોલ્ટેજ પર સ્વિચ કરવામાં આવતાં પ્રવાહ વધે છે, પરિણામે બ્રેકિંગ ટોર્કમાં વધારો થાય છે.