અસુમેળ મોટરનું આવર્તન નિયમન
હાલમાં, અસુમેળ મોટર સાથે ઇલેક્ટ્રિક ડ્રાઇવના પરિભ્રમણની કોણીય ગતિના આવર્તન નિયંત્રણનો વ્યાપકપણે ઉપયોગ થાય છે, કારણ કે તે નજીવા મૂલ્યની ઉપર અને નીચે બંને રોટરના પરિભ્રમણની ગતિને વિશાળ શ્રેણીમાં સરળતાથી બદલવાની મંજૂરી આપે છે.
ફ્રીક્વન્સી કન્વર્ટર્સ એ આધુનિક, ઉચ્ચ-તકનીકી ઉપકરણો છે જેમાં વિશાળ ગોઠવણ શ્રેણી છે જેમાં અસુમેળ મોટર્સને નિયંત્રિત કરવા માટે કાર્યોનો વ્યાપક સમૂહ છે. ઉચ્ચ ગુણવત્તા અને વિશ્વસનીયતા પંપ, ચાહકો, કન્વેયર્સ વગેરેની ડ્રાઇવને નિયંત્રિત કરવા માટે વિવિધ ઉદ્યોગોમાં તેનો ઉપયોગ કરવાનું શક્ય બનાવે છે.

સપ્લાય વોલ્ટેજ માટે ફ્રીક્વન્સી કન્વર્ટર્સને સિંગલ-ફેઝ અને ત્રણ-તબક્કામાં વિભાજિત કરવામાં આવે છે, પરંતુ ડિઝાઇન દ્વારા, ફરતી અને સ્થિર ઇલેક્ટ્રિકલ મશીનોમાં. ઇલેક્ટ્રીક મશીન કન્વર્ટર્સમાં, ચલ આવર્તન પરંપરાગત અથવા વિશિષ્ટ ઇલેક્ટ્રિક મશીનોનો ઉપયોગ કરીને મેળવવામાં આવે છે. વી સ્થિર આવર્તન કન્વર્ટર સપ્લાય વર્તમાનની આવર્તનમાં ફેરફાર વિદ્યુત તત્વોના ઉપયોગ દ્વારા પ્રાપ્ત થાય છે જેમાં કોઈ ગતિ નથી.
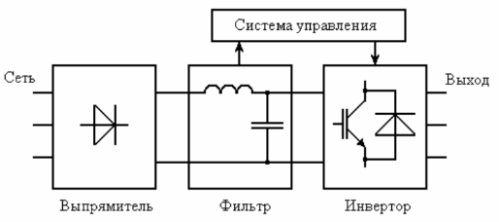
ઇન્ડક્શન મોટરનું ફ્રીક્વન્સી કન્વર્ટર સર્કિટ
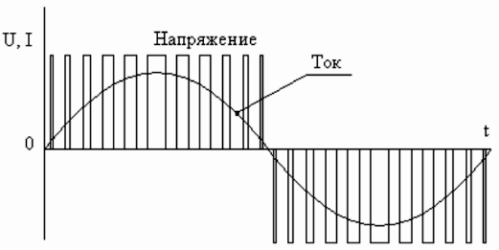
ફ્રીક્વન્સી કન્વર્ટરનું આઉટપુટ સિગ્નલ
સિંગલ-ફેઝ મેઇન્સ માટે ફ્રીક્વન્સી કન્વર્ટર 7.5 kW સુધીની શક્તિ સાથે ઉત્પાદન સાધનો માટે ઇલેક્ટ્રિક ડ્રાઇવ પ્રદાન કરી શકે છે. આધુનિક સિંગલ-ફેઝ કન્વર્ટર્સની ડિઝાઇનની વિશેષતા એ છે કે ઇનપુટ પર 220V ના વોલ્ટેજ સાથેનો એક તબક્કો છે, અને આઉટપુટ પર સમાન વોલ્ટેજ મૂલ્ય સાથે ત્રણ તબક્કાઓ છે, જે ત્રણ-તબક્કાના ઇલેક્ટ્રિક મોટર્સને કનેક્ટ કરવાની મંજૂરી આપે છે. કેપેસિટર્સનો ઉપયોગ કર્યા વિના ઉપકરણ.
380V થ્રી-ફેઝ નેટવર્ક દ્વારા સંચાલિત ફ્રીક્વન્સી કન્વર્ટર 0.75 થી 630 kW ની પાવર રેન્જમાં ઉપલબ્ધ છે. પાવર મૂલ્યના આધારે, ઉપકરણો પોલિમર સંયુક્ત અને મેટલ કેસોમાં બનાવવામાં આવે છે.
ઇન્ડક્શન મોટર્સ માટે સૌથી લોકપ્રિય નિયંત્રણ વ્યૂહરચના વેક્ટર નિયંત્રણ છે. હાલમાં, મોટાભાગના ફ્રીક્વન્સી કન્વર્ટર્સ વેક્ટર કંટ્રોલ અથવા તો સેન્સરલેસ વેક્ટર કંટ્રોલનો અમલ કરે છે (આ વલણ ફ્રીક્વન્સી કન્વર્ટર્સમાં જોવા મળે છે જે મૂળ રૂપે સ્કેલર કંટ્રોલનો અમલ કરે છે અને તેમાં સ્પીડ સેન્સરને કનેક્ટ કરવા માટે ટર્મિનલ્સ નથી).
આઉટપુટ લોડના પ્રકાર પર આધાર રાખીને, ફ્રિક્વન્સી કન્વર્ટરને અમલીકરણના પ્રકાર અનુસાર પેટાવિભાજિત કરવામાં આવે છે:
-
પંપ અને ફેન ડ્રાઈવો માટે;
-
સામાન્ય ઔદ્યોગિક ઇલેક્ટ્રિક પ્રોપલ્શન માટે;
-
ઓવરલોડ સાથે કાર્યરત ઇલેક્ટ્રિક મોટર્સના ભાગ રૂપે કામ કરે છે.

લાક્ષણિક લોડ્સની યાંત્રિક લાક્ષણિકતાઓ
આધુનિક ફ્રિક્વન્સી કન્વર્ટર્સમાં વિવિધ કાર્યાત્મક લાક્ષણિકતાઓનો સમૂહ હોય છે, ઉદાહરણ તરીકે, તેમની પાસે મોટરના પરિભ્રમણની ગતિ અને દિશાનું મેન્યુઅલ અને સ્વચાલિત નિયંત્રણ હોય છે, તેમજ બિલ્ટ-ઇન પોટેંશિયોમીટર નિયંત્રણ પેનલ પર.0 થી 800 Hz સુધીની આઉટપુટ ફ્રીક્વન્સી રેન્જને સમાયોજિત કરવાની ક્ષમતા સાથે ભેટ.
કન્વર્ટર્સ પેરિફેરલ સેન્સર્સના સંકેતો અનુસાર અસુમેળ મોટરને આપમેળે નિયંત્રિત કરવામાં અને આપેલ સમયના અલ્ગોરિધમ અનુસાર ઇલેક્ટ્રિક ડ્રાઇવ ચલાવવા માટે સક્ષમ છે. ટૂંકા ગાળાના પાવર નિષ્ફળતાના કિસ્સામાં સ્વચાલિત પુનઃપ્રાપ્તિ કાર્યોને સપોર્ટ કરો. રિમોટ કન્સોલથી ક્ષણિક નિયંત્રણ કરો અને ઇલેક્ટ્રિક મોટર્સને ઓવરલોડથી સુરક્ષિત કરો.

પરિભ્રમણના કોણીય વેગ અને પુરવઠા પ્રવાહની આવૃત્તિ વચ્ચેનો સંબંધ Eq થી અનુસરે છે
ωo = 2πe1/ p
સતત સપ્લાય વોલ્ટેજ U1 અને આવર્તનમાં ફેરફાર સાથે, ઇન્ડક્શન મોટરના ચુંબકીય પ્રવાહમાં ફેરફાર થાય છે. તે જ સમયે, ચુંબકીય સિસ્ટમના વધુ સારા ઉપયોગ માટે, વીજ પુરવઠાની આવર્તનમાં ઘટાડા સાથે, વોલ્ટેજને પ્રમાણસર ઘટાડવું જરૂરી છે, અન્યથા સ્ટીલમાં ચુંબકીય પ્રવાહ અને નુકસાન નોંધપાત્ર રીતે વધશે.
તેવી જ રીતે, જેમ જેમ સપ્લાય આવર્તન વધે છે તેમ, ચુંબકીય પ્રવાહને સ્થિર રાખવા માટે વોલ્ટેજ પ્રમાણસર વધવું જોઈએ, કારણ કે અન્યથા (સતત શાફ્ટ ટોર્ક સાથે) આનાથી રોટર કરંટ વધશે, તેના વિન્ડિંગ્સને વર્તમાન દ્વારા ઓવરલોડ કરશે અને મહત્તમ ટોર્ક ઘટશે.
તર્કસંગત વોલ્ટેજ નિયમન કાયદો પ્રતિકાર ક્ષણની પ્રકૃતિ પર આધાર રાખે છે.
સ્થિર લોડ (Ms = const) ની સતત ક્ષણે, વોલ્ટેજ તેની આવર્તન U1 / f1 = const ના પ્રમાણમાં નિયંત્રિત હોવું જોઈએ. ચાહક લોડની પ્રકૃતિ માટે, ગુણોત્તર U1/f21 = const સ્વરૂપ લે છે.
ઝડપ U1 /√f1 = const ના વિપરિત પ્રમાણસર લોડ ટોર્ક સાથે.
નીચેના આંકડાઓ કોણીય ગતિના આવર્તન નિયંત્રણ સાથે ઇન્ડક્શન મોટરની સરળ કનેક્શન ડાયાગ્રામ અને યાંત્રિક લાક્ષણિકતાઓ દર્શાવે છે.
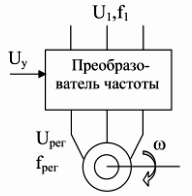
અસુમેળ મોટર સાથે ફ્રીક્વન્સી કન્વર્ટરનું કનેક્શન ડાયાગ્રામ
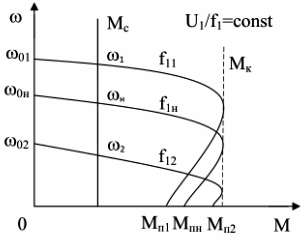
પ્રતિકારની સતત સ્થિર ક્ષણ સાથે લોડ માટેની લાક્ષણિકતાઓ
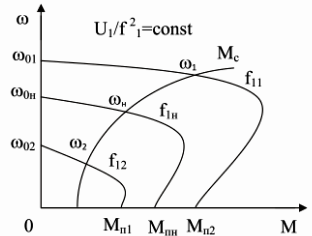
પંખાને ચાર્જ કરવા માટે એનએસ ફીચર્સ
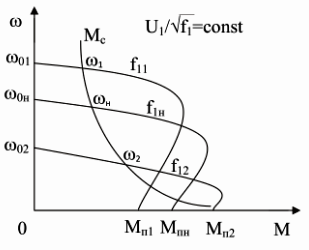
સ્થિર લોડ ટોર્ક હેઠળની લાક્ષણિકતાઓ પરિભ્રમણના કોણીય વેગના વિપરિત પ્રમાણસર
અસુમેળ મોટરની ગતિનું આવર્તન નિયમન તમને શ્રેણીમાં પરિભ્રમણની કોણીય ગતિને બદલવાની મંજૂરી આપે છે — 20 … 30 થી 1. મુખ્યથી નીચેની અસુમેળ મોટરની ગતિનું નિયમન વ્યવહારીક રીતે શૂન્ય સુધી કરવામાં આવે છે.
જ્યારે સપ્લાય નેટવર્કની આવર્તન બદલાય છે, ત્યારે અસુમેળ મોટરની રોટેશનલ સ્પીડની ઉપલી મર્યાદા તેના યાંત્રિક ગુણધર્મો પર આધાર રાખે છે, ખાસ કરીને કારણ કે નજીવી અસુમેળ મોટરની ઉપરની ફ્રીક્વન્સી પર ઓછી ફ્રીક્વન્સીઝ કરતાં વધુ સારી ઉર્જા લાક્ષણિકતાઓ સાથે કામ કરે છે. તેથી, જો ડ્રાઇવ સિસ્ટમમાં ગિયરબોક્સનો ઉપયોગ કરવામાં આવે છે, તો મોટરનું આ આવર્તન નિયંત્રણ ફક્ત નીચે જ નહીં, પણ નજીવા બિંદુથી ઉપર, યાંત્રિક શક્તિની શરતો હેઠળ પરિભ્રમણની મહત્તમ અનુમતિપાત્ર ગતિ સુધી હાથ ધરવામાં આવવું જોઈએ. રોટર
જ્યારે એન્જિનની ઝડપ તેના પાસપોર્ટમાં દર્શાવેલ મૂલ્ય કરતાં વધી જાય છે, ત્યારે પાવર સ્ત્રોતની આવર્તન નજીવી એક કરતાં 1.5 - 2 વખતથી વધુ ન હોવી જોઈએ.
ખિસકોલી-કેજ રોટર ઇન્ડક્શન મોટરના નિયમન માટે આવર્તન પદ્ધતિ સૌથી વધુ આશાસ્પદ છે. આવા નિયમન સાથે પાવર ખોટ ઓછી હોય છે, કારણ કે તેમાં વધારો થતો નથી લપસી જવું… પરિણામી યાંત્રિક લાક્ષણિકતાઓ અત્યંત કઠોર છે.