સંપર્કકર્તા નિયંત્રણ અને મોટર સુરક્ષા સર્કિટ
 કરવા માટેના કાર્યના આધારે, વિવિધ કોન્ટેક્ટર મોટર કંટ્રોલ સર્કિટ છે.
કરવા માટેના કાર્યના આધારે, વિવિધ કોન્ટેક્ટર મોટર કંટ્રોલ સર્કિટ છે.
આકૃતિ 1a એ બદલી ન શકાય તેવા ચુંબકીય સ્ટાર્ટરની સંયુક્ત યોજના બતાવે છે... તેમાં, તત્વોની ગોઠવણી પ્રકૃતિની ગોઠવણ સાથે એકરુપ છે, એટલે કે, સ્ટાર્ટર બોક્સમાં સ્થિત તમામ તત્વો આકૃતિની ડાબી બાજુએ જૂથબદ્ધ છે, અને "સ્ટાર્ટ" અને "સ્ટોપ" બટનો સાથે પુશ બટન સ્ટેશન આકૃતિની જમણી બાજુએ બતાવેલ છે.
બટન સ્ટેશન સામાન્ય રીતે થી અમુક અંતરે સ્થિત છે ચુંબકીય સ્ટાર્ટર… મોટર કંટ્રોલ સર્કિટના સંચાલનના સિદ્ધાંતને સમજવા માટે, સામાન્ય રીતે વિગતવાર (મૂળભૂત) આકૃતિઓનો ઉપયોગ કરવામાં આવે છે (ફિગ. 1.b). SB2 સ્ટાર્ટ બટન દબાવવાથી, KM કોન્ટેક્ટર કોઇલ સર્કિટ બંધ થાય છે, જેમાં મોટર સપ્લાય સર્કિટના ત્રણ KM સંપર્કોનો સમાવેશ થાય છે. આ કિસ્સામાં, સ્ટાર્ટ બટન SB2 સાથે સમાંતરમાં જોડાયેલ બ્લોક સંપર્ક KM પણ બંધ થાય છે. જ્યારે SB2 બટન રીલીઝ થાય ત્યારે આ તમને KM કોઇલને એનર્જાઇઝ કરવાની મંજૂરી આપે છે.
જ્યારે કોઇલ બંધ થાય છે અને પાવર (મુખ્ય) સંપર્કો અને સહાયક સંપર્ક છોડે છે ત્યારે SB1 બટન દબાવીને મોટર બંધ થઈ જાય છે. જ્યારે SB1 બટન રીલીઝ થાય છે, ત્યારે કોઇલ KM નું સર્કિટ ડી-એનર્જાઈઝ થઈ જશે. એન્જિન પુનઃપ્રારંભ કરવા માટે, ફરીથી SB2 બટન દબાવો.
આ સર્કિટ કહેવાતા શૂન્ય સુરક્ષા પણ પ્રદાન કરે છે, એટલે કે, જો મુખ્ય વોલ્ટેજ અદૃશ્ય થઈ જાય અથવા નોમિનલના 50-60% સુધી ઘટી જાય, તો KM કોઇલ KM પાવર સંપર્કોને પકડી શકશે નહીં અને મોટર બંધ થઈ જશે. જ્યારે વોલ્ટેજ દેખાય છે અથવા નજીવા મૂલ્યની નજીકના મૂલ્ય સુધી વધે છે, ત્યારે ચુંબકીય સ્ટાર્ટર સ્વયંભૂ કામ કરશે નહીં. તેને ચાલુ કરવા માટે, તમારે ફરીથી પ્રારંભ બટન દબાવવાની જરૂર છે.
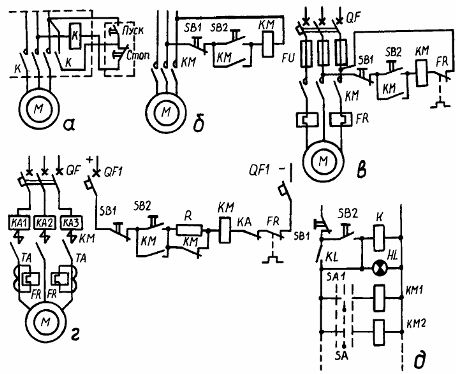
ચોખા. 1. મોટર કંટ્રોલ અને પ્રોટેક્શન સ્કીમ: a — સંયુક્ત અને b — બદલી ન શકાય તેવા ચુંબકીય સ્ટાર્ટરની વિગતવાર યોજના; c - ફ્યુઝ અને થર્મલ રિલે દ્વારા એન્જિનનું રક્ષણ; ડી - શક્તિશાળી એન્જિન કંટ્રોલ સ્ટેશનનો આકૃતિ; ડી - મધ્યવર્તી રિલેથી શૂન્ય રક્ષણ
વિન્ડિંગના ઓવરહિટીંગથી મોટરનું રક્ષણ લાંબા સમય સુધી ઓવરલોડ દરમિયાન કરવામાં આવે છે થર્મલ રિલે FR, અને મોટા ઓવરલોડ અથવા શોર્ટ સર્કિટ સામે રક્ષણ ફ્યુઝ FU અથવા દ્વારા પ્રદાન કરવામાં આવે છે સર્કિટ બ્રેકર્સ QF (ફિગ. 1, c). લાંબા સમય સુધી ઓવરલોડ સામે રક્ષણ આપવા માટે, બે થર્મલ રિલેનો ઉપયોગ કરવામાં આવે છે, કારણ કે એક રિલે સાથે, ફૂંકાયેલા ફ્યુઝની ઘટનામાં, શ્રેણીમાં જેની સાથે આ રિલેનું હીટિંગ એલિમેન્ટ જોડાયેલ છે, મોટર સિંગલ-ફેઝ નેટવર્ક સાથે જોડાયેલ હશે અને તેઓ સુરક્ષિત રહેશે નહીં. આ રિલેના બ્રેકિંગ સંપર્કો સ્ટાર્ટર કોઇલ સાથે શ્રેણીમાં જોડાયેલા છે. જ્યારે તેમાંથી કોઈ એક ખુલે છે, ત્યારે KM કોઇલ ડી-એનર્જાઈઝ થાય છે અને મોટર બંધ થઈ જાય છે, જેમ કે જ્યારે SB1 બટન દબાવવામાં આવે છે.
હાઇ પાવર મોટર કંટ્રોલ સ્ટેશન ફિગમાં બતાવવામાં આવ્યું છે. 1, ડી. ઓવરલોડ રિલે KA1 — KA3 દ્વારા શોર્ટ-સર્કિટ પ્રોટેક્શન પૂરું પાડવામાં આવે છે, વર્તમાન ટ્રાન્સફોર્મર્સ દ્વારા જોડાયેલા થર્મલ રિલે FR દ્વારા ઓવરલોડ પ્રોટેક્શન પૂરું પાડવામાં આવે છે. ત્રણ-ધ્રુવ સંપર્કકર્તાની કોઇલ સીધી વર્તમાન સાથે પૂરી પાડવામાં આવે છે. સર્કિટમાં સમાવિષ્ટ કર્યા પછી કોન્ટેક્ટર કોઇલમાં વર્તમાનને ઘટાડવા માટે, એક વધારાનો પ્રતિકાર આર રજૂ કરવામાં આવે છે, જે અગાઉ ખુલ્લા સંપર્ક KM દ્વારા ટૂંકા કરવામાં આવ્યો હતો.
બહુવિધ નિયંત્રકો, સ્વીચો અથવા અન્ય ઉપકરણો સાથેના મેન્યુઅલ કંટ્રોલ સર્કિટમાં, મધ્યવર્તી રિલેનો ઉપયોગ તટસ્થ સુરક્ષા પ્રદાન કરવા માટે થાય છે. (ફિગ. 1, e). કંટ્રોલ સર્કિટમાં વોલ્ટેજ લાગુ કરવા માટે, SB2 બટન દબાવો, ત્યાંથી મધ્યવર્તી રિલે K ચાલુ કરો, જેમાં તેનો બંધ સંપર્ક K અને સિગ્નલ લેમ્પ HL શામેલ છે, જે કંટ્રોલ સર્કિટમાં વોલ્ટેજની હાજરી સૂચવે છે. . SB2 બટનને રિલીઝ કર્યા પછી, રિલે કોઇલને અવરોધિત કરવામાં આવશે જ્યારે SM1 નિયંત્રક, SM પેકેટ સ્વીચ વગેરેના સર્કિટ. અને સંપર્કકર્તાઓ KM1, KM2, વગેરેની કોઇલ ઊર્જાવાન થશે.
ધ્યાનમાં લેવામાં આવેલી યોજનાઓમાં, મોટર્સના સતત સંચાલન માટે સ્વ-લોકીંગ સંપર્કો જરૂરી છે. ઘણીવાર વ્યવહારમાં એન્જિનને માત્ર ત્યારે જ ચલાવવાની જરૂર પડે છે જ્યારે સ્ટાર્ટ બટન દબાવવામાં આવે, ઉદાહરણ તરીકે લિફ્ટિંગ મશીનમાં. આ કિસ્સામાં, કંટ્રોલ સર્કિટમાં કોઈ સ્ટોપ બટન નથી (ફિગ. 2, એ). કેટલીકવાર ડ્રાઇવના સંચાલનને બે મોડમાં સુનિશ્ચિત કરવું જરૂરી છે, એટલે કે, મશીન સેટ કરતી વખતે અથવા લાંબા સમય સુધી તેને ટૂંકા સમય માટે ચાલુ કરવું. પછી, બટન SB2 (ફિગ. 2.b) ના ટૂંકા પ્રેસ સાથે, સંપર્કકર્તા KM ની કોઇલ ચાલુ થઈ જશે અને KMનો સ્વ-લોકીંગ સંપર્ક બંધ થઈ જશે, જ્યારે SB2 બટન છોડવામાં આવશે ત્યારે મોટર ચાલશે. .
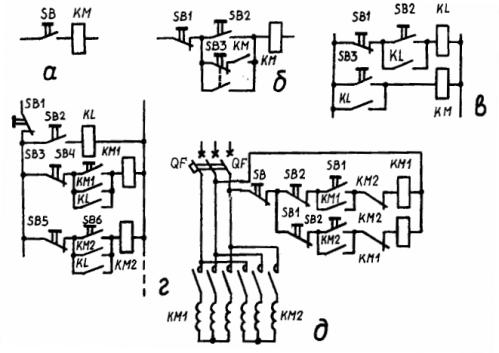
ચોખા. 2. અસુમેળ મોટર્સ માટે કંટ્રોલ સર્કિટના પ્રકાર: a — જોગિંગ મોડમાં; b અને c — લાંબા સમય સુધી કામ અને જોગિંગ દરમિયાન; d — અનેક એન્જિનનો એક સાથે સમાવેશ; d — બે-સ્પીડ મોટરની સ્ટેપલેસ શરૂઆત
મોટર કંટ્રોલ મોડ માટે, SB3 બટન દબાવો, તેનો ક્લોઝિંગ કોન્ટેક્ટ કોન્ટેક્ટર KM ની કોઇલ ચાલુ કરે છે અને ઓપનિંગ કોન્ટેક્ટ કોન્ટેક્ટરના સેલ્ફ-લોકીંગ સર્કિટને તોડે છે. આ સર્કિટનો ગેરલાભ એ છે કે SB3 બટનનો ખુલ્લો સંપર્ક KM બ્લોકનો સંપર્ક ખૂલે તે પહેલાં બંધ થઈ શકે છે અને મોટર બંધ થતી નથી. ફિગમાં બતાવેલ સર્કિટ. 2, f, આ ખામીથી રહિત છે.
સતત કામગીરી માટે, SB2 બટન દબાવવાથી મધ્યવર્તી રિલે K ચાલુ થાય છે. સંપર્કોમાંથી એક K સંપર્કકર્તા KM ની કોઇલ ચાલુ કરે છે, અને અન્ય એક સાથે SB2 બટનને અવરોધિત કરે છે, જેનાથી સ્ટાર્ટ બટન વડે એન્જિનનું સંચાલન બંધ થાય છે. પ્રકાશિત. ઓપરેશન શરૂ કરવા માટે, SB3 બટન દબાવો અને જરૂરી સમય માટે તેને પકડી રાખો.
આકૃતિ 2d મધ્યવર્તી રિલેનો ઉપયોગ કરીને એક સ્ટાર્ટ બટનથી એક જ સમયે ઘણી મોટર્સ શરૂ કરવાની યોજના બતાવે છે ... બટન SB2 રિલે K ચાલુ કરે છે, જેનાં બંધ સંપર્કો એક સાથે સંપર્કકર્તા KM1, KM2, વગેરેના કોઇલને ચાલુ કરે છે. SB1 બટન વડે બધી મોટર્સને એકસાથે બંધ કરો. દરેક મોટરને વ્યક્તિગત રીતે ચાલુ અને બંધ કરવા માટે, અનુક્રમે SB3, SB4 અને SB5, SB6, વગેરે બટનોનો ઉપયોગ કરો.
બે-સ્પીડ ટુ-વાઇન્ડિંગ ખિસકોલી-કેજ રોટર મોટરનો સ્ટેપલેસ પ્રારંભિક ડાયાગ્રામ ફિગમાં બતાવેલ છે. 2, e. પ્રથમ ઝડપે એન્જિન શરૂ કરવા માટે, બટન SB1 નો ઉપયોગ થાય છે, બીજા પર - SB2.એન્જિનને એક જ સમયે બે સ્પીડમાં રોકાતા અટકાવવા માટે બંને બટનો યાંત્રિક રીતે એકબીજા સાથે જોડાયેલા છે.
સ્ટાર્ટર સર્કિટ પણ ઇલેક્ટ્રિકલી અવરોધિત છે. તેથી, જ્યારે, ઉદાહરણ તરીકે, કોઇલ KM1 સક્રિય થાય છે, ત્યારે પ્રારંભિક સંપર્ક કોઇલ KM2 ના સર્કિટને તોડે છે, તેના સમાવેશની શક્યતાને બાદ કરતાં. બીજી ઝડપ પર સ્વિચ કરવા માટે, તમારે બટન SB2 દબાવવાની જરૂર છે, જ્યારે કોઇલ KM1 નું સર્કિટ તૂટી ગયું છે અને તે બંધ થાય છે. KM2 સર્કિટની કોઇલ પાવર મેળવે છે અને બીજી ઝડપે મોટર ચાલુ કરે છે.
બે કોન્ટેક્ટર્સ (ફિગ. 3, એ) નો ઉપયોગ કરીને અસુમેળ મોટર્સનું વિપરીત નિયંત્રણ હાથ ધરવામાં આવે છે.
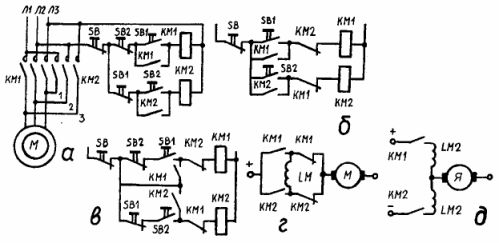
ફિગ. 3. એન્જિન નિયંત્રણ યોજનાઓ: a — યાંત્રિક અવરોધ સાથે ઉલટાવી શકાય તેવું ચુંબકીય સ્ટાર્ટર; b — વિદ્યુત અવરોધ સાથે સમાન; c — વિકલ્પો a અને bનું સંયોજન; d અને e — લો પાવર ડીસી મોટર્સ શરૂ અને ઉલટાવી
કોન્ટેક્ટર KM1 નો ઉપયોગ મોટરને આગળ જોડવા માટે થાય છે અને KM2 નો ઉપયોગ રિવર્સમાં થાય છે. આકસ્મિક રીતે બે સંપર્કકર્તાઓને એકસાથે ચાલુ થવાથી રોકવા માટે, જે શોર્ટ સર્કિટ તરફ દોરી જાય છે, સર્કિટ SB1 અને SB2 બટનોના બે અવરોધક સંપર્કો સાથે મ્યુચ્યુઅલ મિકેનિકલ બ્લોકિંગનો ઉપયોગ કરે છે (ફિગ. 3, a જુઓ. બટન SB1 દબાવીને, ચાલુ કરો. કોઇલ KM1 નું સર્કિટ અને કોઇલ સર્કિટ KM2 ને ડિસ્કનેક્ટ કરો.
જ્યારે SB1 અને SB2 બટનો એકસાથે દબાવવામાં આવે છે, ત્યારે કોઇલ KM1 અને KM2 ના સર્કિટ તૂટી જાય છે અને કોઈપણ સંપર્કકર્તા ચાલુ થશે નહીં. બ્લોકીંગ બે અવરોધક સંપર્કો KM2 અને KM1 દ્વારા હાથ ધરવામાં આવે છે, જે અનુક્રમે KM1 અને KM2 ના સર્કિટમાં સમાવિષ્ટ છે (ફિગ. 3, b). આ સ્કીમમાં એન્જિનને રિવર્સ કરવા માટે, તમારે પહેલા SB બટન દબાવવું પડશે.
ફિગ માં સર્કિટ. 3, c એ બે અગાઉના સર્કિટનું સંયોજન છે, એટલે કે, ત્યાં ડબલ બ્લોકિંગ છે.SBI બટન સંપર્કકર્તા KM1 ને ચાલુ કરે છે, અને સંપર્કકર્તા KM2 ના કોઇલનું સર્કિટ બટન SB1 અને બ્લોક KM1 ના સંપર્કના એકસાથે ખુલ્લા સંપર્ક દ્વારા તૂટી જાય છે.
આકૃતિ 3, d અને e લો-પાવર ક્રમિક રીતે ઉત્તેજિત મોટર્સને શરૂ કરવા અને ઉલટાવી દેવા માટેની સૌથી સરળ યોજનાઓ બતાવે છે... આવી મોટરો રિઓસ્ટેટ્સ શરૂ કર્યા વિના નેટવર્ક સાથે જોડાયેલ છે. ફિગ માં રેખાકૃતિ અનુસાર. 3, ડી, શ્રેણી ઉત્તેજના સાથે મોટરની શરૂઆત અને રિવર્સિંગ બે મધ્યવર્તી રિલે દ્વારા હાથ ધરવામાં આવે છે. LM ફીલ્ડ કોઇલમાં વિદ્યુતપ્રવાહની દિશા ઉલટાવીને મોટરને ઉલટાવી દેવામાં આવે છે. બે શ્રેણીના ફીલ્ડ વિન્ડિંગ્સ સાથેની મોટર્સમાં વિરૂદ્ધ દિશામાં ચુંબકીય પ્રવાહ બનાવે છે, સ્વિચિંગ અને રિવર્સિંગ સર્કિટમાં માત્ર બે સંપર્ક સંપર્કો હોય છે (જુઓ. ફિગ. 3, e).
માનવામાં આવેલ નિયંત્રણ યોજનાઓમાંથી જોઈ શકાય છે તેમ, ખિસકોલી-કેજ રોટર અસિંક્રોનસ મોટર્સને શરૂ કરવાની અને ઉલટાવી દેવાની પ્રક્રિયાને સ્વચાલિત કરવી સૌથી સરળ છે. આ કિસ્સામાં, જ્યારે શરૂ થાય છે ત્યારે તમામ નિયંત્રણ મોટરને પાવર નેટવર્કથી કનેક્ટ કરવા માટે ઘટાડવામાં આવે છે, અને જ્યારે બંધ થાય છે - નેટવર્કથી ડિસ્કનેક્ટ થવા માટે.
રોટરના ફેઝ વિન્ડિંગ સાથે ઇન્ડક્શન મોટર્સને શરૂ કરવા, બંધ કરવા અને રોકવાનું ઓટોમેશન વધુ જટિલ છે, વધેલી શક્તિની ઇન્ડક્શન સ્ક્વિરલ-કેજ મોટર્સ, મધ્યમ અને ઉચ્ચ શક્તિની ડીસી મોટર્સ, સ્ટેપ સ્ટાર્ટ સાથે મલ્ટિ-સ્પીડ ઇન્ડક્શન મોટર્સ, તેમજ સિંક્રનસ મોટર્સ તરીકે. આ એન્જિન નિયંત્રિત છે સમયના કાર્ય તરીકે, ઝડપ અને વર્તમાન.
ઉપરોક્ત કિસ્સાઓ ઉપરાંત, એન્જિન નિયંત્રણ કરી શકાય છે અને માર્ગ સિદ્ધાંત અનુસાર, જ્યારે એન્જિન શરૂ થાય છે અને ધીમો પડી જાય છે જ્યારે કાર્યકારી શરીર અવકાશમાં ચોક્કસ સ્થાને પહોંચે છે.આવા કાર્યો કરતી સિસ્ટમ્સને ઓપન-લૂપ સિસ્ટમ્સ કહેવામાં આવે છે કારણ કે તેમની પાસે આઉટપુટ મૂલ્ય અને ઇનપુટ મૂલ્ય વચ્ચે કોઈ પ્રતિસાદ નથી.